Kokeilujen kautta optimoitu valaistus konenäköjärjestelmälle
Robotiikka Akatemia otti vastaan toimeksiannon tutkia alumiiniprofiilien valaistusta konenäköjärjestelmää varten. Projektissa kuvattiin viisi erimuotoista alumiiniprofiilia kahdeksalla eri valaistuksella. Profiileista korostettiin naarmuja, kuplia ja saumoja. Projektiryhmä tutki erilaisten valaistusmetodien käyttäytymistä linjastolla liikkuvia alumiiniprofiileja kuvattaessa. Projektiryhmässä työskentelivät Atte Ali-Hokka, Meeri Simberg, Toni Seessalo ja Markus Virtanen.

Toimeksiantajayritys on ohjelmistokehittäjä, jonka ei ole kannattavaa kohdistaa resurssejaan valaistuksen tutkimiseen. Opiskelijoille tällaiset projektit antavat loistavia mahdollisuuksia päästä tekemään käytännönläheistä tutkimusta.
Projektin työryhmä aloitti tutkimukset tutustumalla erilaisiin valaistustekniikoihin, kuten suora-, dark field- ja diffuusiovalaistukseen. Tämän jälkeen ryhmä tutki muita kuvaamisen vaikuttavia tekijöitä, kuten valon väriä, kameran tarkennusta ja ulkopuolisen valon esiintymistä kuvausympäristössä.
Tavoitteena riittävä kontrasti
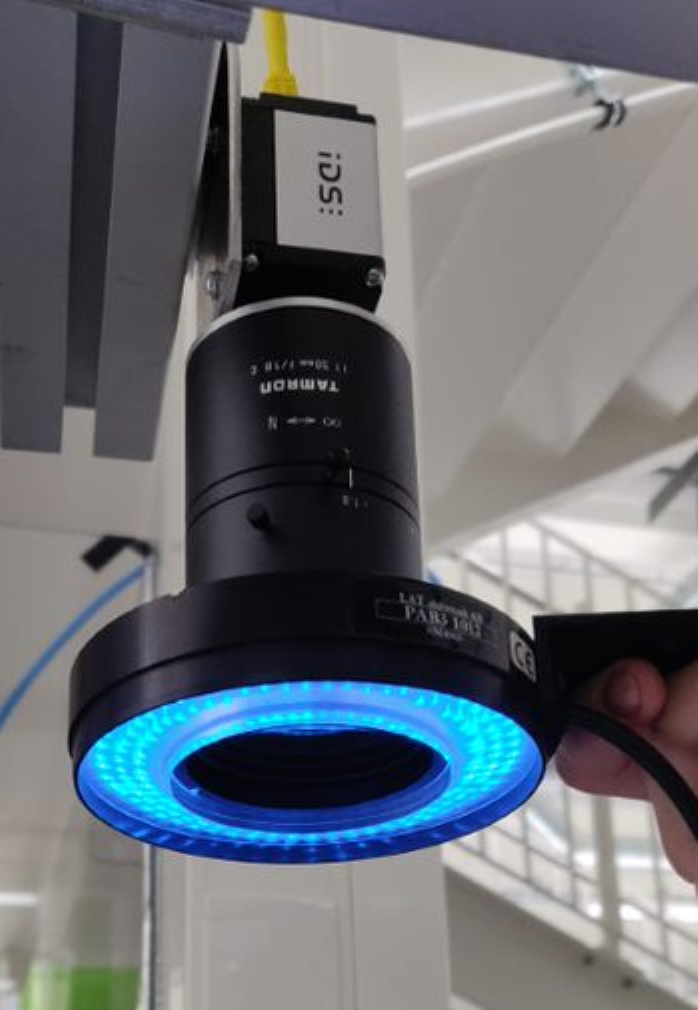
Koska tutkittavien alumiiniprofiilien pinnat olivat värittömiä ja kiiltäviä, ei eri valon väreillä saada korostettua tutkittavia virheitä. Eri muotoisten profiilien valaiseminen osoittautui haastavaksi, eikä optimaalinen valaistus ole toteutettavissa yhdellä valaisutekniikalla. Optiikkana käytettiin moottorioptiikkaa, jolla pystyttiin tarkentamaan profiilin korkeuden mukaan kuvattavaan pintaan, jolloin opiskelijoille jäi selvitettäväksi mahdollisimman suuren kontrastin tuottaminen yritystä kiinnostaviin kohteisiin.
Alustavan tutkimuksen ja testausympäristön optimoinnin jälkeen työryhmä teki testiajon, jossa profiilit liikkuivat valaistuksen poikki ja kamera kuvasi profiileista virheellisen pinnan. Kuvadatan keräämisen jälkeen työryhmä teki kuvien perusteella analyysin, jossa pohdittiin kappaleiden muodon, riittävän kontrastin ja inhimillisen virheen vaikutusta testien tuloksiin. Kun kaikkien profiilien ominaisuudet otettiin huomioon, kahdeksasta valaistusasetelmasta parhaaksi osoittautui sivuvalo. Sivuvalaistus tuotti parhaan kontrastin kuvausalalle.
Lisätietoja Robotiikka Akatemian yritysprojekteista:
Tutkimusjohtaja
Petteri Pulkkinen
p. 044 710 3296
petteri.pulkkinen@samk.fi
Yliopettaja, automaation tutkimusryhmän vetäjä
Mirka Leino
p. 044 710 3182
mirka.leino@samk.fi
Lisää aiheesta

Lue myös
Tilaa uutiskirje
Tilaamalla uutiskirjeen saat uutiset ja tapahtumat uunituoreena sähköpostiisi ja pysyt ajantasalla.