Yhteistyöcaset
RoboAI:n yhteistyöcaset yhdistävät yritysten tarpeet, asiantuntijoiden ammattitaidon ja opiskelijoiden tuoreet ja innovatiiviset näkemykset.
Yhteistyöprojektit ovat tärkeä osa RoboAI:n toimintaa. Asiantuntijat tuottavat ja testaavat projektien avulla uutta tutkimustietoa yritysten käyttöön. Akatemioiden opiskelijat pääsevät casejen kautta käytännönläheisesti oppimaan, innovoimaan ja kokeilemaan uusia ideoita. Tällä sivulla esittelemme uusimpia ja merkittävimpiä casejamme.
RoboAI Industry
Pori Energian kanssa toteutetussa Proof of Concept -pilotissa kehitettiin konenäköön ja tekoälyyn perustuva ratkaisu, joka tunnistaa automaattisesti työntekijöiden turvavarusteet, kuten kypärän, suojalasit, kuulosuojaimet ja turvaliivin. Tavoitteena oli selvittää, miten tekoäly voi tukea työturvallisuutta teollisuusympäristössä ja ehkäistä puutteellisesta suojautumisesta aiheutuvia riskejä.
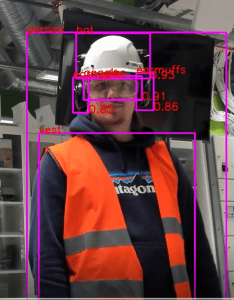
Pilotissa toteutettu järjestelmä tunnisti työntekijän suojavarusteet reaaliaikaisesti ja ilmoitti ulkoisen näytön avulla, mikäli jokin pakollinen varuste puuttui. Ratkaisua esiteltiin myös Pori Energian Safety Day -tapahtumassa, ja se osoitti, että tekoälyyn perustuva turvavarusteiden valvonta on käytännössä toimiva ja helposti hyödynnettävä ratkaisu.
Pilotin tulokset loivat vahvan pohjan ratkaisun jatkokehitykselle ja osoittivat, että tekoäly voi tukea turvallisempien työympäristöjen rakentamista sekä tehostaa työturvallisuuden seurantaa.
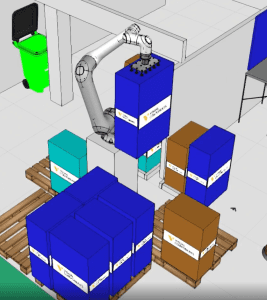
Biolan Oy:n kanssa toteutetussa kokeilussa ja sitä seuranneessa Proof of Concept -pilotissa selvitettiin, kuinka erikokoisten pakkituotteiden lavaus voitaisiin automatisoida siirrettävän yhteistyörobottisolun avulla. Tavoitteena oli kehittää joustava ratkaisu, jota voitaisiin hyödyntää useilla tuotantolinjoilla sekä vähentää fyysisesti kuormittavaa manuaalista työtä.
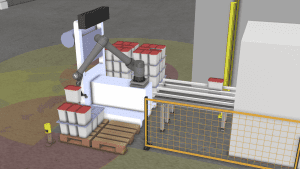
Projektissa suunniteltiin robottisolun layout, kehitettiin erikokoisille tuotteille soveltuva tarttujaprototyyppi ja arvioitiin turvallisuusratkaisuja. Onnistuneiden kokeilujen pohjalta toteutetussa PoC-pilotissa ratkaisu testattiin käytännössä oikealla robotilla ja todellisilla tuotteilla, mikä tuotti arvokasta tietoa järjestelmän jatkokehitystä varten.
Pilotin tulokset osoittivat, että yhteistyörobotti soveltuu hyvin pakkituotteiden joustavaan lavaukseen ja tarjoaa lupaavan vaihtoehdon tuotannon automatisointiin. Samalla yritys sai konkreettisia suosituksia ratkaisun käyttöönoton tueksi.
Lue lisää kokeilusta ja pilotista.
Nurmilo Oy:n kanssa toteutetussa kokeilussa ja sitä seuranneessa PoC-pilotissa selvitettiin, miten pienten metallisten ja kiiltävien kappaleiden poimintaa voitaisiin automatisoida konenäön ja yhteistyörobotin avulla. Tavoitteena oli löytää luotettava ratkaisu toisteiseen ja tarkkuutta vaativaan työvaiheeseen.
Kokeiluissa vertailtiin erilaisia konenäkömenetelmiä ja havaittiin, että erityisesti taustavalaistus parantaa kiiltävien kappaleiden tunnistettavuutta. PoC-pilotissa ratkaisu vietiin pidemmälle kompaktilla robottisolulla, jossa UR5e-yhteistyörobotti ja Cognexin älykamera poimivat kappaleita jatkuvassa syklissä.
Pilotin tulokset osoittivat, että ratkaisu on toteutettavissa yrityksen toivomalla laitekokoonpanolla. Samalla Nurmilo Oy sai konkreettista tietoa ratkaisun luotettavuudesta, työkierron ajasta ja mahdollisuuksista hyödyntää joustavaa robottisolua myös tulevaisuuden tarpeisiin.
Lue lisää kokeilusta ja pilotista.
Piir-Group Oy:n kanssa toteutetussa kokeilussa ja sitä seuranneessa Proof of Concept -pilotissa selvitettiin, kuinka erikokoisten kalustelevyjen poiminta, käsittely ja lavaaminen voitaisiin automatisoida yhteistyörobotin avulla. Tavoitteena oli kehittää joustava ratkaisu, joka tunnistaa levyt automaattisesti ja käsittelee niitä ilman ylimääräistä manuaalista työtä.
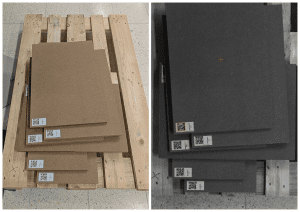
Projektissa hyödynnettiin QR-koodeja, konenäköä ja robotiikkaa levyjen tunnistamiseen sekä niiden optimaalisen käsittelyn suunnitteluun. Kokeilun tulokset validoitiin PoC-pilotissa, jossa ratkaisu testattiin käytännössä yhteistyörobotilla. Samalla arvioitiin robottisolun teknisiä vaatimuksia, kuten tarttujan, kameran ja robotin ulottuvuuden soveltuvuutta.
Pilotin tulokset osoittivat, että ratkaisu soveltuu hyvin kalusteteollisuuden tuotannon automatisointiin. Lisäksi työ toi esiin mahdollisuuksia hyödyntää levyjen tunnistetietoja myös esimerkiksi varastonhallinnassa ja tuotannon seurannassa, mikä tukee tuotantoprosessin kokonaisvaltaista digitalisointia.
Lue lisää kokeilusta ja pilotista.
Neorem Magnets Oy:n kanssa toteutetussa Proof of Concept -pilotissa kehitettiin konenäköjärjestelmää pienten tuotantokappaleiden tarkkaan mittaamiseen osana laadunvarmistusta. Tavoitteena oli parantaa mittaustarkkuutta, nopeuttaa mittausprosessia ja selvittää järjestelmän soveltuvuus tuotantoympäristöön.
Pilotissa kehitettiin telesentriseen optiikkaan, konenäkökameraan ja MVTec HALCON -ohjelmistoon perustuva ratkaisu yhteistyössä yrityksen kanssa. Järjestelmän tarkkuutta ja mittausalgoritmeja hiottiin vastaamaan paremmin todellisia tuotantotilanteita, minkä lisäksi yritys sai käytännön kokemusta konenäköjärjestelmien hyödyntämisestä.
Pilotin tuloksena saavutettiin aiempaa tarkempi ja luotettavampi mittausratkaisu, joka nopeutti laadunvarmistusta ja loi pohjan konenäön laajemmalle hyödyntämiselle yrityksen tuotannossa.
RoboAI Health
Yhä useampi kohtaa arjessaan mielen hyvinvointiin liittyviä haasteita. Esimerkiksi sosiaalisten tilanteiden pelko, esiintymisjännitys ja stressi ovat monelle arkipäivää. Erityisesti nuorillle tarvitaan uudenlaisia heidän näköisiään ratkaisuja perinteisten kynä-/paperi -menetelmien tueksi. Teknologia tarjoaa kaivattuja matalan kynnyksen välineitä näiden haasteiden työstämiseen.
Kustannustehokkaita ja helposti saavutettavia ratkaisuja mielen hyvinvoinnin edistämiseksi.
Altistus
Altistushoito on yksi tehokkaimmista menetelmistä ahdistuksen hoidossa. Tutkimusten mukaan 60-75% altistushoidolla hoidetuista henkilöistä kokevat saavansa tilaansa jonkinlaista helpotusta ja vaikutukset ovat pitkäaikaisia. Altistushoito perustuu pelon kohtaamiseen. Kun ihmisen altistetaan pelkonsa kohteelle riittävän pitkään, mieli sopeutuu pelkoa aiheuttavaan ärsykkeeseen, jolloin se ei aiheuta enää stressitilaa. Virtuaalitodellisuus on potentiaalinen työkalu altistushoidolle, koska sen avulla pystytään tuottamaan aidontuntuisia kokemuksia turvallisessa ympäristössä. Digitaalisessa ympäristössä pystytään myös tekemään monenlaisia muutoksia (esim. säätämään ärsykkeiden määrää ja tilanteen etenemistä), joita todellisessa maailmassa on hankala tai kallis toteuttaa (vrt. esim. lentopelko ja lentäminen).

Esimerkki: Altistussovellus julkisten paikkojen pelkoon
Demossa käyttäjä asioi kaupassa. Hänen tavoitteenaan on jonottaa ja maksaa ostokset. Demossa käytetään aitoa 360 -kuvaa, jota katsellaan virtuaalilaseilla. Käyttäjä voi edetä demossa interaktiosta (mene jonoon) toiseen (asioi myyjän kanssa) omaan tahtiinsa. Harjoitteen tarkoituksena on saada aikaan ahdistusvaste, odottaa stressitilan lieventymistä ja jatkaa sitten yksi askel kerrallaan, omassa tahdissa.
Rentoutus
VR -teknologiaa voidaan käyttää myös rentoutumisen tukemiseen. Käyttäjä voidaan viedä virtuaalisesti monenlaisiin rentouttaviin ympäristöihin (esim. luontoon). Virtuaalimaailmaan voidaan lisätä erilaisia terapeuttisia työkaluja, joiden avulla rentoutumista ja palautumista voidaan tehostaa. Esimerkiksi virtuaalimaailmaan lisättyjen hengitysharjoitteiden avulla voidaan aktivoida
parasympaattista hermostoa palautumisen edistämiseksi.
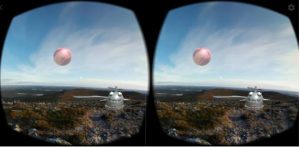
Esimerkki: Hengitysharjoite
Rentoutusdemossa käytetään aitoa 360 -kuvaa, jota on kuvattu tunturimaisemassa Lapissa. Rentoutusharjoitteen ohjaaminen tapahtuu demoon rakennetun hahmon kautta. Lisäksi demossa hyödynnetään oikeanlaisessa rytmissä suurenevaa ja pienenevää palloa, joka ohjaa hengitystä rentoutumisen ja palautumisen tehostamiseksi.
”Virtuaalitodellisuus tarjoaa parhaimmillaan täysin uudenlaisia mahdollisuuksia toteuttaa mm. altistushoitoja. Virtuaalitodellisuuden ja erilaisten teknologisten sovellusten hyödyntäminen ja jatkuva kehittäminen on nykypäivää ja teknologian rooli psykiatrisessa hoitotyössä tulee todennäköisesti vain tulevaisuudessa kasvamaan”
Anna Mäkelä
Nuorisopsykiatrian erikoislääkäri, vs ylilääkäri, Satakunnan sairaanhoitopiiri, Porin nuorisopsykiatrian poliklinikka

Dyme Solution Oy:n Florie-paineanturia testattiin keväällä 2023 Satasairaalan kehitysvammapalveluiden asumisyksikkö Naskalissa.
Testauksen tavoitteena oli arvioida, miten sängyn jalkoihin asetetut anturit mahdollistavat liikkumisen reaaliaikaisen seurannan ja sen vaikutukset asukkaan yöaikaiseen turvallisuuteen ja koko yksikön öiseen rauhallisuuteen. Lisäksi arvioitiin Florie-antureiden toimivuutta ja käytettävyyttä tuotteena ja käyttöliittymän käyttäjälähtöisyyttä ja toimivuutta.
Testauksessa Naskalin asumisyksikön asukkaan sängyn jalkojen alle asennettiin anturit, jotka painon muutosten avulla havaitsevat sängystä poistumisen ja lähettivät tiedon Dyme Solution Oy:n pilvipalveluun. Hoitajat saivat hälytyksen sängystä poistumisesta kännykkään ladattavan sovelluksen avulla.
Tuotteen koettiin sopivan erityisesti heikosta tasapainosta kärsiville, kaatumisvaarassa oleville ”huonojalkaisille” asukkaille, jotka kuitenkin ovat virkeitä tai levottomia öisin tai voivat pyrkiä jalkeille sängyn laidoista huolimatta. Tuote on hyödyllinen, kun yksikkö on pinta-alaltaan suuri ja välimatkat pitkiä ja yksikössä on paljon tehtävää yöllä ja vain vähän valvovaa henkilökuntaa.
Henna Leppäsen YAMK-opinnäytetyö Floriesta (Theseus)
Tutkimuskeskukset yritysten kumppaneina - RoboAI ja Dyme Solutions Oy (Youtube)
Kuntoutuskentällä kaivataan uudenlaisia keinoja omaehtoisen kuntoutumisen tueksi. Asiakaskunta on kuitenkin hyvin heterogeenista toimintakyvyn ja kuntoutustarpeen ollessa yksilöllinen. Peleissä hyödynnetään paljon elementtejä, joiden avulla motivaatiota, innostusta ja sitoutumista voidaan lisätä. Peleihin voidaan upottaa myös ”hyöty” elementtejä, jolloin puhutaankin tyypillisesti hyötypeleistä. Haasteena hyötypeleissä on pelin sisällön sovittaminen erilaisille käyttäjäryhmille. Erityisesti kaivataan modulaarista ja käyttäjän mukaan muovautuvaa ratkaisua.
Pelin ideana on aktivoida käyttäjää kevyeen fyysiseen harjoitteeseen sekä samalla harjaannuttaa koordinaatiota ja havainnoimista. Vaikeimmin toimintarajoitteisilla keskeinen tavoite on osallistaminen ja uusien elämyksien mahdollistaminen.
Ohjaimet
Fyysisen aktiivisuuden lisäämiseksi, käytetään pelin ohjaukseen kehon liikkeitä. Peliä ohjataan pienellä asentoa tarkkailevalla anturilla (kallistusanturi). Anturidata lähetetään bluetoothilla mobiililaitteelle, jossa peli on asennettuna. Anturi voidaan kiinnittää eri raajoihin tai erilaisiin esineisiin, joita pelaaja liikuttaa. Näin vaadittavaa ohjausliikettä voidaan modifioida käyttäjän tarpeen mukaisesti. Modulaarisuutta pystytään lisäämään kustomoitavilla ohjainratkaisuilla, jotka 3d-tulostetaan. 3d-tulostus mahdollistaa täysin yksilöllisten ohjainten valmistamisen, kunhan anturi saadaan liitettyä ohjaimeen.
3D-tulostusteknologiaksi valikoitui FDM (fused deposition modeling), jossa suuttimeen syötetty muovilanka kuumennetaan materiaalille sopivaan lämpötilaan. Sulanut muovi pursotetaan tulostusalustalle kerros toisensa jälkeen muodostaen näin lopulta koko kappaleen. Tulostusmateriaalina käytettiin PLA:ta (polyactide) sen tulostusominaisuuksien, kuten matalan tulostuslämpötilan takia sekä sen mittatarkkuuden vuoksi.
Tässä esimerkkiohjaimina käytettiin:
- tasapainolautaa, jolloin liikkeitä voidaan tehdä jaloilla (istuen tuolilla tai seisoen
 tasapainolaudan päällä)
tasapainolaudan päällä)
 tasapainolaudan päällä)
tasapainolaudan päällä)
- käsiohjaimia, joissa on lukuisia tapoja tarttumiseen (kahvat voidaan vaihtaa ja ohjain voidaan kiinnittää vartaloon)


- pääohjaimella, jolloin ohjaus mahdollistuu ilman käsien ja jalkojen käyttöä

Pelit
Esimerkkipelinä toteutettiin yksinkertainen labyrinttipeli, jossa pelaajan (hiiri) on tarkoitus kerätä sydämiä (kuva). Peliä voidaan säätää eri käyttäjien mukaan. Esimerkiksi pelielementtien kokoa ja nopeutta, sokkeloiden määrää ja sijaintia sekä vastustajien määrää/laatua voidaan helposti muuttaa käyttäjän tarpeen mukaisesti. Olennaista on sovittaa vaikeustaso ja pelaajan kyvyt. Peli toteutettiin adaptiiviseksi -se mukautuu pelaajan kykyihin lisäämällä vaikeustasoa vastustajien ja sokkeloiden avulla. Peli alkaa kuitenkin mahdollisimman yksinkertaisesti ilman sokkeloita ja vastustajia. Tällöin esimerkiksi hahmottamis- ja motorisia haasteita omaavat voivat keskittyä vaikka koko pelinsä ensimmäisen sydämen keräämiseen ilman, että pelin liika vaikeus tappaa motivaation. Toisaalta edistynyt pelaaja ei tylsisty, sillä peli vaikeutuu automaattisesti, kun sydämiä onnistutaan keräämään lisää. Samaa ohjausteknologiaa voidaan hyödyntää lukuisien erilaisten pelien kanssa ja niitä työstetään parhaillaan.

"On tärkeää, että kuntoutuminen on myös mukavaa. Juuri mielekkyyden lisäämiseen pelit ovat hyvä apukeino. Olemme ottaneet uusia työkaluja sekä yksilöharjoitteluun että osaksi ryhmiä."
Helena Myllymäki
laatupäällikkö ja työfysioterapeutti, Kuntoutuskeskus Kankaanpää
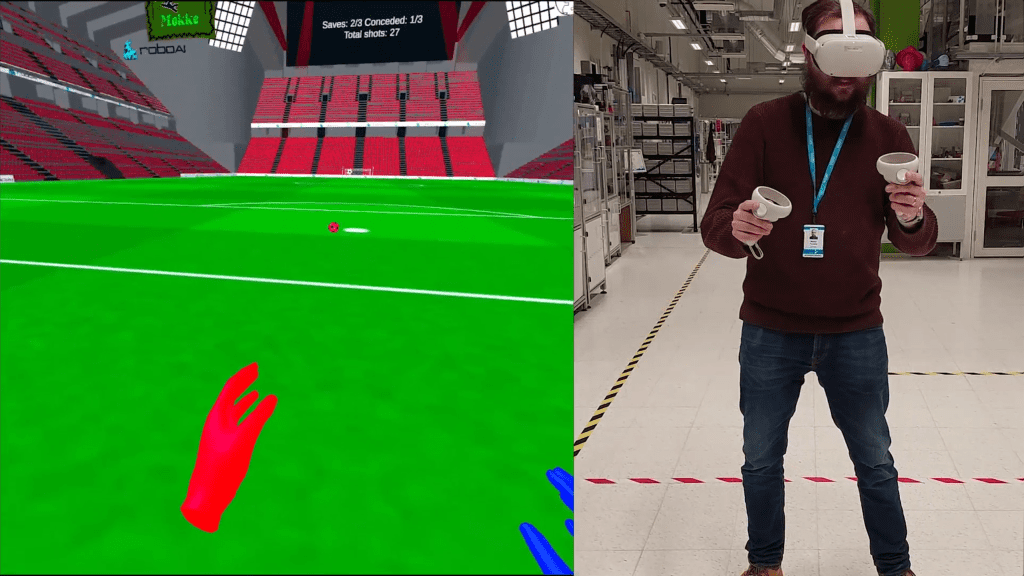 RoboAI Healthin ja Rauman Fysikaalinen Hoitola Oy:n yhteistyönä kehitettiin virtuaalitodellisuutta hyödyntävä kuntoutukseen soveltuva Mokke-peli. Kehitystä vauhditti johtava ajatus asiakkaan yksilöllisten tavoitteiden mukaan säädettävistä ominaisuuksista ja pelaamisen aikaisen liikkeen tietojen hyödyntämisestä. Oleellinen osa pelin soveltuvuudesta terapiakäyttöön on peliin kehitetty mahdollisuus hallita pelin säätöjä ulkoisesti.
RoboAI Healthin ja Rauman Fysikaalinen Hoitola Oy:n yhteistyönä kehitettiin virtuaalitodellisuutta hyödyntävä kuntoutukseen soveltuva Mokke-peli. Kehitystä vauhditti johtava ajatus asiakkaan yksilöllisten tavoitteiden mukaan säädettävistä ominaisuuksista ja pelaamisen aikaisen liikkeen tietojen hyödyntämisestä. Oleellinen osa pelin soveltuvuudesta terapiakäyttöön on peliin kehitetty mahdollisuus hallita pelin säätöjä ulkoisesti.
Tarve pelin kehittämiseen syntyi Rauman Fysikaalinen Hoitola Oy:n (RFH) omistajien ideasta saada käyttöön virtuaalisuutta hyödyntävä peli, jonka avulla aktivoidaan koko kehoa ja ennen kaikkea alaraajoja. SAMKissa kehitettyä Mokke-peliä ohjataan yläraajojen avulla, mutta pelissä voidaan kuitenkin aktivoida tarpeen mukaan alaraajoja tai toteuttaa harjoittelu istuen. RFH:n fysioterapeuttien toiveesta pelin tuli olla asiakkaalle yksinkertainen, mutta haasteellinen ja yksilöllisesti säädettävä, jotta motivaatio peliin säilyisi ja harjoittelu olisi tavoitteellista. Kuntoutumisen ja tavoitteiden toteutumisen seuraaminen edellyttävät asiakkaan toimintojen mittaamista ja tarkkailua. Fysioterapeuteille on tämän vuoksi tärkeää saada nähtäväksi pelaamisen avulla kertyvä tieto liikeradoista, liikkeen laajuudesta, nopeudesta ja tarkkuudesta.
Kuntoutuksessa hyödynnettävä virtuaalisuus, erityisesti “immersiivinen virtuaalisuus” VR-lasien avulla, vähentää kivuntuntemusta (Wong, Tse & Qin, 2022). Mokke-pelissä harjoittelun avulla tavoitellaan asiakkaan aktivoimista liikkeelle ja harjoitusten tekemistä luonnollisilla liikeradoilla vähäisemmällä kiputuntemuksella. Kuntoutuja saattaa pelin aikana suorittaa suurempia liikeratoja ja useampia toistoja, kuin perinteisesti tehtyjen harjoitteiden muodossa.
 Yksilöllinen ja hauska tapa kuntoutua
Yksilöllinen ja hauska tapa kuntoutua
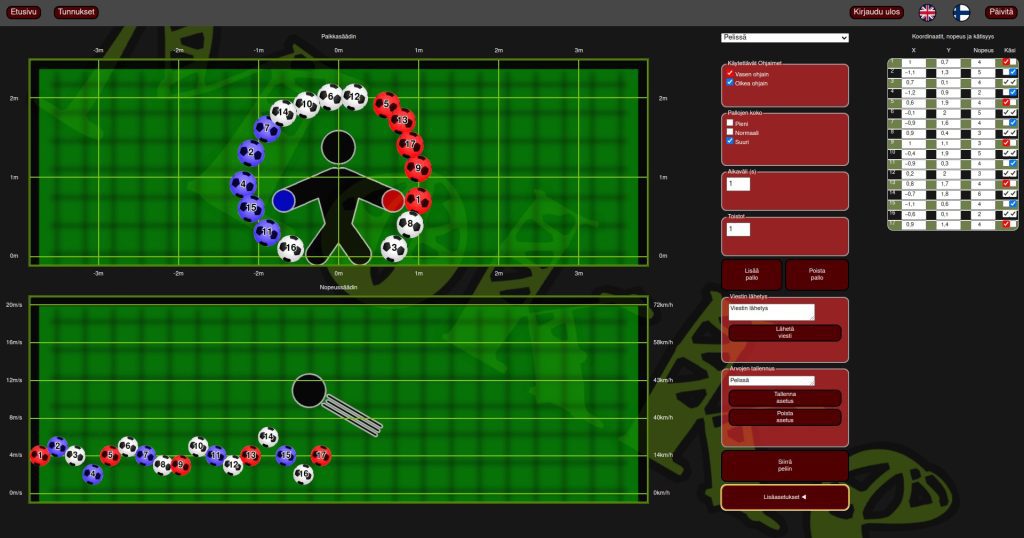
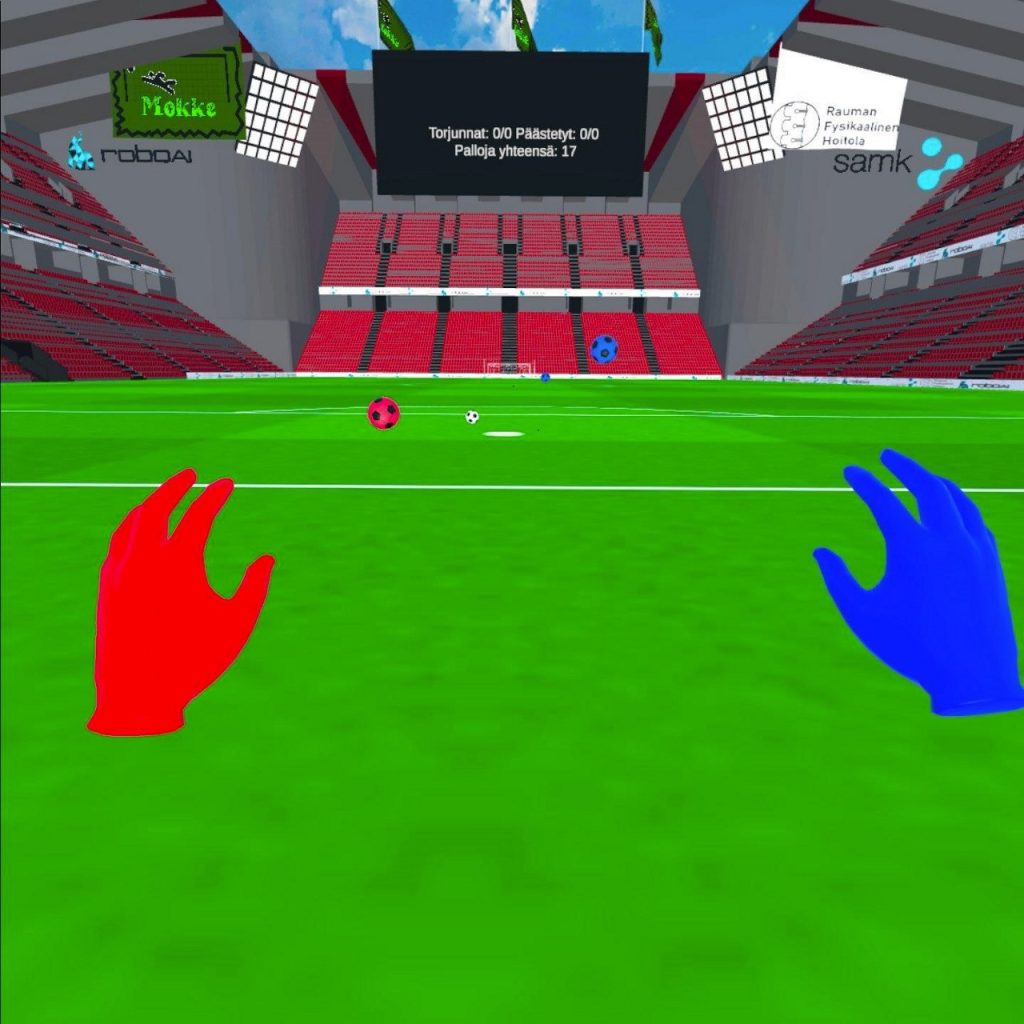
Mokke-pelissä kuntoutuja toimii jalkapallomaalivahtina hyödyntäen virtuaalilaseja (kuva 1). Pelin keskeisenä ominaisuutena on peliasetusten säätäminen hyödyntäen etäohjaussovellusta (kuva 2). Esimerkiksi pallojen tuloaikoja, -paikkoja, -nopeuksia ja pallon kokoa säätämällä voidaan säätää asetuksia fysioterapian näkökulmasta kuntoutujan tarpeita ja tavoitteita vastaaviksi.
Itse pelissä kerätään virtuaalilasien ohjainten tuottamaa dataa fysioterapeutin analysoitavaksi. Dataa saadaan ohjainten sijainnista, liikkeen nopeudesta ja kiihtyvyydestä. Etähallintasovelluksessa näkyy koordinaatistossa liikelaajuuksien maksimi- ja minimiarvot, maksimi -ja miniminopeudet, harjoituksen kesto sekä torjuttujen pallojen lukumäärä. Lisäksi saadaan visuaalisia kuvaajia ohjainten sijainti- ja nopeusdatasta. Tietokantaan kerääntyvän harjoitusdatan avulla pystytään seuraamaan kuntoutujan edistymistä ja suunnittelemaan uusia harjoitteita.
 Harjoittelualueen tulee olla riittävän suuri, jos halutaan hyödyntää koko pelin kapasiteetti. Jalkapallomaali vastaa siis tässä pelissä kooltaan oikeaa jalkapallomaalia. On kuitenkin mahdollista pelata pienemmällä alueella, jolloin säädöillä voidaan huomioida eri asiakkaiden tarpeet. Pelin edelleen kehittäminen on mahdollista ja alaraajojen käyttäminen ohjaimissa olisi mielenkiintoinen variaatio. Tässä vaiheessa ohjaimia ei vielä voitu kiinnittää alaraajoihin, mutta erilaiset sensorit tai kiinnitysmekanismit voisivat mahdollistaa tämän.
Harjoittelualueen tulee olla riittävän suuri, jos halutaan hyödyntää koko pelin kapasiteetti. Jalkapallomaali vastaa siis tässä pelissä kooltaan oikeaa jalkapallomaalia. On kuitenkin mahdollista pelata pienemmällä alueella, jolloin säädöillä voidaan huomioida eri asiakkaiden tarpeet. Pelin edelleen kehittäminen on mahdollista ja alaraajojen käyttäminen ohjaimissa olisi mielenkiintoinen variaatio. Tässä vaiheessa ohjaimia ei vielä voitu kiinnittää alaraajoihin, mutta erilaiset sensorit tai kiinnitysmekanismit voisivat mahdollistaa tämän.
RFH:n fysioterapeuttien Hannakaisa Mäkitalon ja Hanna Teerialhon mielestä Mokke-peli on kiinnostava lisä kuntoutukseen, kuten koko VR-maailma yleisestikin: “Pelinä jalkapallo nimenomaan oli hyvä ratkaisu tuttuuden vuoksi. Peliä voisi toteuttaa hyvin myös muissa lajeissa, kuten salibandyssa tai jääkiekossa. Olisikin hienoa, jos samassa simulaatiossa olisi mahdollista valita eri lajien välillä.”
Mokke-peli on kehitetty Opetus- ja kulttuuriministeriön rahoittamassa (Erityisavustus varhaiskasvatuksen ja opetustoimen henkilöstön osaamisen kehittämiseen ja korkeakoulutuksen verkostomaiseen kehittämiseen) hankkeessa Verkostoyhteistyöllä vauhtia tekoälypohjaisten virtuaaliteknologioiden saavutettavuuteen kuntoutuksessa.
Mokke-peliä on myös testattu Pallo-Iirojen maalivahtivalmennuksen apuvälineenä. Lue tästä lisää Satakunta Testbedin sivuilta!
Lisätiedot:
Taina Jyräkoski
taina.jyrakoski@samk.fi
 Neppie-sovelluksen testaus toteutettiin elokuusta joulukuuhun 2024 Satakunnan ammattikorkeakoulun koordinoimana. Testaus suoritettiin Tukena Woimaamossa, jossa sovellusta käytettiin osana asiakkaiden päivittäisiä rutiineja. Testattava tuote oli FunctionApp Oy:n kehittämä Neppie-sovellus, joka on suunniteltu tukemaan arkirutiinien hallintaa.
Neppie-sovelluksen testaus toteutettiin elokuusta joulukuuhun 2024 Satakunnan ammattikorkeakoulun koordinoimana. Testaus suoritettiin Tukena Woimaamossa, jossa sovellusta käytettiin osana asiakkaiden päivittäisiä rutiineja. Testattava tuote oli FunctionApp Oy:n kehittämä Neppie-sovellus, joka on suunniteltu tukemaan arkirutiinien hallintaa.
Testauksen tavoitteena oli arvioida, miten Neppie tukee asiakkaiden toiminnanohjausta ja ammattilaisten työskentelyä sekä kerätä käyttäjäkokemuksia sovelluksen kehittämistä varten. Lisäksi haluttiin kartoittaa, mitä erityispiirteitä sovellustestaukseen liittyy Woimaamon asiakasryhmällä.
Testauksen toteutus Testaukseen osallistui seitsemän asiakasta ja yksi ohjaaja Woimaamosta. Sovellusta testattiin pääasiassa siivoustehtävissä. Testijakson aikana sovellusta käytettiin kahden tabletin avulla kahdesti viikossa, ja tehtäväketjut sisälsivät 4–8 vaihetta. Testauksen alussa henkilökunta sai koulutuksen sovelluksen käyttöön. Palautetta kerättiin anonyymillä kyselylomakkeella.
Havainnot ja tulokset:
- Neppie tuki asiakkaita toiminnanohjauksessa ja lisäsi itseohjautuvuutta.
- Henkilökunta toivoi ketjujen luontiin lisää sujuvuutta.
- Kuvien skaalautuvuus ei toiminut optimaalisesti.
- Sovellus sopii parhaiten yksinkertaisiin ja toistuviin tehtäviin.
- Pelillistämistä ei pidetty tarpeellisena aikuisille käyttäjille.
- Palautteissa sovellus koettiin selkeäksi ja käyttäjäystävälliseksi.
- Sovellustestauksessa tulee mahdollistaa testausasetelman joustavuus ja mahdollisuus reagoida muuttuviin tilanteisiin sekä ohjeiden selkokielisyys.
Kehitysehdotukset:
- Tehtäväketjujen luonnin nopeuttaminen ja joustavuus.
- Kuvien skaalausongelman ratkaiseminen.
- Mahdollisuus piilottaa tehtäviä ja muokata ketjuja lennossa.
- Tehtäväketjun etenemisen visualisointi ja "taukoaskel"-ominaisuus
Yhteenveto
Neppie on tehokas työkalu toiminnanohjaukseen, mutta ketjujen hallinnan kehittäminen lisäisi sen hyötyä ja käytettävyyttä entisestään. Asiakkaat pitivät sovellusta helppokäyttöisenä ja selkeänä apuvälineenä arkeen.
Voit tutustua caseen tarkemmin Satakunta Testbedin verkkosivuilla.
 Satakunnan ammattikorkeakoulun IKI-hanke testasi tammi-helmikuussa 2024 Tacticin pelejä ikäihmisillä Diakonkylän asunnoissa. Tarkoituksena oli selvittää, miten pelejä voisi kehittää, jotta ne sopisivat tälle kohderyhmälle. Viidessä pelitapahtumassa testattiin Kimble, Kimble Junior, Etsi ja löydä! Luontoretki ja Ötökät-muistipeliä. Osallistujia oli yhteensä 56, ja he pelasivat 3–4 hengen ryhmissä. Hanketyöntekijät ohjasivat pelejä ja keräsivät palautetta. Osa pelaajista edellytti toiminnanohjausta pelin aikana.
Satakunnan ammattikorkeakoulun IKI-hanke testasi tammi-helmikuussa 2024 Tacticin pelejä ikäihmisillä Diakonkylän asunnoissa. Tarkoituksena oli selvittää, miten pelejä voisi kehittää, jotta ne sopisivat tälle kohderyhmälle. Viidessä pelitapahtumassa testattiin Kimble, Kimble Junior, Etsi ja löydä! Luontoretki ja Ötökät-muistipeliä. Osallistujia oli yhteensä 56, ja he pelasivat 3–4 hengen ryhmissä. Hanketyöntekijät ohjasivat pelejä ja keräsivät palautetta. Osa pelaajista edellytti toiminnanohjausta pelin aikana.
Keskeiset havainnot:
- Näköaisti: Osassa peleistä ohjeiden kirjasinkoko oli liian pieni, ja pistelaskupaperit olivat vaikeasti luettavia. Tiimalasin valkoinen hiekka oli huonosti havaittavissa, ehdotuksena musta hiekka. Laudalla vihreä, sininen ja lila sekoittuivat keskenään, ja valaistus heijasteli häiritsevästi pelilaudoilta.
- Kognitio: Osa kuvista oli epäselviä tai vaikeasti hahmotettavia, ja kuvien nimeäminen voisi auttaa pelaajia. Muistipelissä korttien määrä jakoi mielipiteitä – ohjeisiin voisi lisätä suosituksen aloittaa pienemmällä pakalla. Pelien säännöissä tulisi olla eri vaikeustasoja.
- Fyysinen toiminta: Kortit olivat pääosin helposti käsiteltäviä, mutta iän tuomat motoriset haasteet aiheuttivat haasteita osalle. Pelilaudat liikkuivat pöydällä, ja niiden alle voisi lisätä liukuesteet. Nappulat olivat monille liian pieniä, ja tiimalasin kääntäminen oli hankalaa.
- Sosiaalinen tilanne: Yhdessä pelaaminen koettiin sosiaalisesti palkitsevaksi, mutta myös yksinpelimahdollisuus olisi hyvä mainita ohjeissa.
Testauksen perusteella Tacticin peleillä on potentiaalia ikäihmisten mielekkään arjen tukemisessa, mutta saavutettavuuden ja käytettävyyden parantamiseksi tarvitaan selkeämpiä ohjeita, voimakkaampaa visuaalisia kontrastia ja fyysisesti helppokäyttöisempiä komponentteja.
Voit tutustua caseen tarkemmin Satakunta Testbedin verkkosivuilla.
 SAMK toteutti Vitacam-sovelluksen testauksen touko-elokuussa 2024 yhteistyössä Diakon Palveluiden kanssa. Testauksessa saatiin arvokasta tietoa vitaalitoimintojen etämittauksen käytettävyydestä ja hyödyllisyydestä kotihoiton kontekstissa. Vitacam on lääkinnällinen ohjelmistolaite, joka mittaa elintoimintoja (hengitystaajuus, pulssi, sydämen rytmi) web- tai mobiilikameran avulla. Testauksen tavoitteena oli arvioida sovelluksen soveltuvuutta ikäihmisten varhaisen voinnin muutosten seurantaan.
SAMK toteutti Vitacam-sovelluksen testauksen touko-elokuussa 2024 yhteistyössä Diakon Palveluiden kanssa. Testauksessa saatiin arvokasta tietoa vitaalitoimintojen etämittauksen käytettävyydestä ja hyödyllisyydestä kotihoiton kontekstissa. Vitacam on lääkinnällinen ohjelmistolaite, joka mittaa elintoimintoja (hengitystaajuus, pulssi, sydämen rytmi) web- tai mobiilikameran avulla. Testauksen tavoitteena oli arvioida sovelluksen soveltuvuutta ikäihmisten varhaisen voinnin muutosten seurantaan.
Testauksen toteutus
Testaukseen osallistui 12 itsenäisesti asuvaa ikäihmistä sekä kaksi sairaanhoitajaa. Testaajat käyttivät sovellusta kahden kuukauden ajan ja suorittivat mittauksia vähintään kolme kertaa viikossa. Sairaanhoitajat saivat viikoittain raportit mittaustuloksista ja reagoivat tarvittaessa poikkeaviin arvoihin.
Keskeiset havainnot
- Testaajat pitivät sovellusta helppokäyttöisenä ja hyödyllisenä.
- Mittausten onnistumisprosentti oli korkea (pulssi 99 %, hengitystaajuus 95 %).
- Teknisiä haasteita esiintyi lähinnä sovelluksen päivitysten ja puhelintelineiden käytön osalta.
- Testaajat kaipasivat selkeämpää ohjeistusta ja lisätietoa mittausarvoista.
Johtopäätökset
Vitacam-sovellus soveltuu hyvin itsenäiseen elintoimintojen seurantaan. Jatkokehityksessä on suositeltavaa parantaa käyttöohjeita, tehdä mittaustulosten seurannasta intuitiivisempaa sekä kehittää lisäohjeistusta mittausolosuhteista. Suositukset on jo otettu huomioon sovelluksen jatkokehityksessä.
Voit tutustua caseen tarkemmin Satakunta Testbedin verkkosivuilla.
RoboAI Cyber
Yhteistyö vauhditti laitetestauksen kehittämistä
Polarteknik Oy osallistui Kytee-hankkeessa toteutettuun laitetestauksen pilotointiin RoboAI Cyberlabissa tavoitteenaan arvioida sähköisen oviohjaimensa kyberturvallisuutta sekä kehittää toimintamallia, jota voitaisiin hyödyntää tuotteiden testaamisessa myös tulevaisuudessa. Pilotointi tarjosi arvokkaita kokemuksia niin yritykselle kuin RoboAI Cyberlabille ja osoitti, kuinka tärkeää avoin yhteistyö on kyberturvallisuuden kehittämisessä.
Testauksen aikana tarkasteltiin sekä itse laitteen kyberturvallisuutta että sitä, millainen testausprosessi palvelisi yritysten tarpeita mahdollisimman hyvin. Polarteknikille oli tärkeää saada ulkopuolinen näkemys tuotteensa turvallisuudesta ja rakentaa toistettava toimintamalli, joka tukee sekä tuotekehitystä että kasvaviin viranomais- ja asiakasvaatimuksiin vastaamista.
Pilotoinnin suurimpia hyötyjä olivat uudet näkökulmat, yhteinen oppiminen ja mahdollisuus kehittää toimintatapoja yhdessä. Testauksen aikana vahvistuivat sekä yrityksen omat havainnot että löytyi uusia kehityskohteita, joita ei välttämättä olisi tunnistettu ilman ulkopuolista asiantuntemusta. Samalla syntyi arvokasta tietoa siitä, miten laitetestauspalveluita voidaan kehittää entistä paremmin teollisuuden käyttöön.
RoboAI Cyberlabin näkökulmasta pilotointi oli tärkeä askel laitetestauksen palveluiden rakentamisessa. Käytännön yhteistyö auttoi ymmärtämään paremmin yritysten tarpeita ja kehittämään testausympäristöä sekä toimintamalleja vastaamaan tulevaisuuden vaatimuksia.
Sekä Polarteknik että RoboAI Cyberlab näkevät kyberturvallisuuden jatkuvana kehittämisenä, jossa luottamus, avoin vuorovaikutus ja asiantuntijuuden jakaminen ovat keskeisessä roolissa. Erityisesti Cyber Resilience Actin (CRA) kaltaiset säädökset lisäävät tarvetta osoittaa tuotteiden kyberturvallisuus järjestelmällisesti ja luotettavasti.
Pilotointi osoitti, että parhaimmillaan laitetestaus on paljon enemmän kuin yksittäisen tuotteen arviointia. Se on yhteistyötä, jonka avulla voidaan kehittää turvallisempia tuotteita, vahvistaa yritysten osaamista ja rakentaa toimintamalleja, jotka tukevat koko teollisuuden kyberturvallisuuden kehittymistä.
Voit tutustua caseen tarkemmin täältä.
Kyberturvallisuus osaksi yrityksen arkea
Knobbi Oy osallistui Kytee-hankkeessa kehitetyn kyberturvallisuuden itsearviointityökalun pilotointiin tavoitteenaan vahvistaa omaa kyberturvallisuusosaamistaan ja saada selkeämpi kuva yrityksen kehityskohteista. Vaikka tietoturva oli jo ennestään osa yrityksen toimintaa, pilotointi osoitti, että kokonaisuudessa oli vielä asioita, joita voitiin kehittää.
Pilotin suurin hyöty oli konkreettisten kehitysaskelten tunnistaminen. Työkalu auttoi jäsentämään laajaa kyberturvallisuuden kokonaisuutta, syvensi ymmärrystä eri osa-alueiden yhteyksistä ja loi yritykselle selkeän pohjan jatkuvalle kehittämiselle. Samalla kyberturvallisuudesta tuli säännöllinen keskustelunaihe yrityksen arjessa.
Knobbi Oy:n toimitusjohtaja Tommi Dahlroosin mukaan itsearviointityökalu tarjosi valmiin rakenteen, jonka avulla yrityksen oli huomattavasti helpompi arvioida omaa kyberturvallisuuden tasoaan kuin aloittamalla työ täysin alusta. AI-chat-ominaisuus tuki myös kysymysten tulkintaa ja helpotti työkalun käyttöä.
Pilotointi vahvisti käsitystä siitä, että kyberturvallisuus ei ole kertaluonteinen projekti, vaan jatkuva prosessi, johon tulee palata säännöllisesti. Työkalu auttoi koko organisaatiota osallistumaan kehittämiseen ja teki kyberturvallisuudesta yhteisen asian yksittäisen henkilön vastuun sijaan.
Kytee-hankkeen projektipäällikkö Jere Grönman kertoo, että itsearviointityökalu on sittemmin auditoitu kolmannen osapuolen toimesta, mikä vahvistaa sen luotettavuutta. Hankkeen aikana työkalu päätettiin avata kaikkien yritysten käyttöön, sillä sen nähtiin tukevan laajasti organisaatioiden kyberturvallisuuden kehittämistä sekä valmistautumista tuleviin vaatimuksiin.
Knobbi Oy:n kokemukset osoittavat, että hyvin rakennettu itsearviointityökalu voi tehdä monimutkaisesta aiheesta selkeän ja käytännönläheisen. Samalla se auttaa yrityksiä tunnistamaan kehityskohteensa ja rakentamaan kyberturvallisuudesta luonnollisen osan jokapäiväistä toimintaa.
RoboAI-akatemia
RoboAI-akatemian opiskelijat kehittivät Pori Energialle VR-pohjaisen turvallisuuskoulutusdemon, jonka tavoitteena on tehdä turvallisuuskoulutuksesta entistä havainnollisempaa ja osallistavampaa.

Projektissa rakennettiin virtuaaliympäristö, jossa käyttäjä voi harjoitella turvallisuusohjeiden noudattamista, tunnistaa työympäristön vaaratekijöitä ja toimia erilaisissa poikkeustilanteissa turvallisesti. Ratkaisu hyödyntää VR-teknologiaa ja pelillisiä elementtejä oppimisen tukena.
Yhteistyö tarjosi opiskelijoille mahdollisuuden kehittää käytännön työelämäratkaisua aidon yritystarpeen pohjalta sekä syventää osaamistaan virtuaalitodellisuuden ja käyttäjäkokemuksen suunnittelussa.
Favorit Tuote Oy:n tarpeena oli löytää edullinen, helposti monistettava ratkaisu pakattavien komponenttien oikeellisuuden varmistamiseen. RoboAI-akatemian opiskelijat kehittivät kaksi erilaista prototyyppiä, joiden tavoitteena on vähentää pakkausvirheitä ja helpottaa kokoonpanotyötä.

Projektissa suunniteltiin kaksi Arduino-ohjattua järjestelmää, joissa ultraäänianturit ja LED-valot ohjaavat pakkaajaa valitsemaan oikeat osat tilauksen mukaisesti. Ratkaisut toteutettiin kahdella erilaisella rakenteella, jotta niiden soveltuvuutta käytännön tuotantoon voitiin vertailla.
Projekti tarjosi opiskelijoille monipuolista kokemusta automaatiosta, anturitekniikasta, ohjelmoinnista ja tuotekehityksestä sekä tuotti yritykselle kaksi toimivaa konseptia jatkokehityksen pohjaksi.
RoboAI-akatemian opiskelijat selvittivät Tukimet Oy:lle, miten suurikokoisten pahvilaatikoiden lavaus voitaisiin automatisoida yhteistyörobotin avulla. Tavoitteena oli vähentää fyysistä kuormitusta, parantaa ergonomiaa ja arvioida robotiikan soveltuvuutta yrityksen tuotantoon.
Projektissa tuotantotila laserkeilattiin ja sen pohjalta rakennettiin tarkka 3D-simulaatiomalli Visual Components -ohjelmistoon. Simulaatioiden avulla vertailtiin useita robottiratkaisuja, niiden ulottuvuutta, turvallisuutta, sykliaikoja ja soveltuvuutta yrityksen tuotantoympäristöön.
Projektin tuloksena Tukimet Oy sai konkreettisia kehitysehdotuksia automaation suunnittelun tueksi, ja opiskelijat kartuttivat käytännön osaamistaan laserkeilauksesta, robotiikasta ja teollisuuden 3D-simuloinnista.
RoboAI-akatemian opiskelijat selvittivät Porin kaupungin ruokapalvelukeskukselle, miten fyysisesti kuormittavaa ruoan annostelua keittopadoista kuljetusastioihin voitaisiin kehittää robotiikan ja automaation avulla. Tavoitteena oli parantaa työn ergonomiaa ja arvioida erilaisten robottiratkaisujen soveltuvuutta käytännön työympäristöön.

Projektissa keittiö laserkeilattiin ja siitä rakennettiin 3D-simulaatiomalli, jonka pohjalta suunniteltiin ja arvioitiin kolme erilaista robottikonseptia. Simulaatioiden avulla tarkasteltiin ratkaisujen tilantarvetta, turvallisuutta, suorituskykyä ja käytettävyyttä osana annosteluprosessia.
Projektin tulokset osoittivat, että täysi robotisointi ei olisi tarkoituksenmukaista, mutta työ toi esiin useita käytännöllisiä kehitysehdotuksia ergonomian parantamiseksi. Opiskelijat saivat arvokasta kokemusta 3D-simuloinnista ja robotiikan soveltamisesta, ja asiakkaalle syntyi konkreettinen pohja tuleville kehitystoimenpiteille.
RoboAI-yhteisöcaset

Robocoast-hankkeen pilottikohteena oli Cimcorp Oy Ulvilassa. Pilotin ensimmäisessä vaiheessa tutkittiin Cimcorpin Dream Factory -konseptiin kuuluvaa rengasrobotiikaan liittyvää tietoa.
Toimilaitteista mitataan dataa koko toiminnan ajan laadun varmistamiseksi sekä tuotekehityksen tueksi. Data-analytiikan avulla toimilaitteiden prosesseja voidaan analysoida sekä optimoida joitakin osa-alueita suorituskyvyn (edelleen) parantamiseksi. Analytiikassa tietokannasta haetaan laitteiden tuottamaa dataa, jota analysoimalla voidaan päätellä sekä yksittäisten laitteiden että kokonaisuuden toimivuutta, ja tehdä tarvittavia muutoksia (iteratiivisesti) ohjausjärjestelmään.
Iteroinnin lisäksi on lukuisia mahdollisuuksia tehostaa tuotantoa optimoimalla esimerkiksi vääriä liikeratoja roboteista, kuten liian suuri ajan/virran käyttö, liikkuvan aktuaattorin kaari/kulma liian iso sekä histogrammien käyttö virhetilojen löytämisessä.
Data-analytiikalla voidaan myös luoda rinnakkaisia mittareita, tarkistamalla tiedon luotettavuus käyttämällä useasta tietolähteestä saatua dataa. Näin voidaan varhaisessa vaiheessa huomata toimilaitteen/komponentin mahdollinen vikaantuminen tai häiriötilanne.
Pilotin toisessa vaiheessa keskityttiin laatikkovaraston hallintajärjestelmän datan analysointiin. Kehitystyössä kokeiltiin erilaisia datan visualisointikeinoja, pääasiassa kunnossapidon ja kehityksen tarpeisiin. Samalla oli kuitenkin pidettävä mielessä, että samaa tietoa voisi tulevaisuudessa lisätä myös asiakaspalvelun tarpeisiin selkeänä ja johdonmukaisena.
Pilotti kesti vuoden ja loppui joulukuussa 2020. Pilotin aikana kävi selväksi, että datan analyysityö on pitkäjänteistä ja jatkuvasti muuttuvaa alati kehittyvässä toimilaiteympäristössä. Kun toimilaitteisiin tulee uusia piirteitä ja uusia mittauskohteita, niin data-analyysin on pysyttävä mukana ja tarjottava asiakkaille ajanmukaista, selkeästi jäsennettyä tietoa.
Cimcorp Oy tuottaa teollisuudelle varaston hallinnan, sekä materiaalin käsittelyn automatisoituja toimilaitteita. Lisätietoja Cimcorpista.

 Porin kaupungin pilotissa pyrittiin datan analysoinnilla ja datan visualisoinnilla tukemaan kahden vuoden välein toteutettavan työhyvinvointikyselyyn liittyvän etätyökokemusosion suunnittelua ja toteutusta. Tampereen yliopiston DAO-tutkimusryhmän asiantuntija laati kyselyalustan, joka rakentui käytännössä kahdesta osasta: puolistrukturoiduista haastatteluista ja sähköisestä kyselystä. Aihe oli hyvin ajankohtainen vallitsevan tilanteen vuoksi ja kyselyä varten haluttiin saada tutkimusryhmän asiantuntijalta uudenlaista näkökulmaa.
Porin kaupungin pilotissa pyrittiin datan analysoinnilla ja datan visualisoinnilla tukemaan kahden vuoden välein toteutettavan työhyvinvointikyselyyn liittyvän etätyökokemusosion suunnittelua ja toteutusta. Tampereen yliopiston DAO-tutkimusryhmän asiantuntija laati kyselyalustan, joka rakentui käytännössä kahdesta osasta: puolistrukturoiduista haastatteluista ja sähköisestä kyselystä. Aihe oli hyvin ajankohtainen vallitsevan tilanteen vuoksi ja kyselyä varten haluttiin saada tutkimusryhmän asiantuntijalta uudenlaista näkökulmaa.
Oli tärkeää selvittää, miten etätyöskentely on työhyvinvoinnin osalta koettu, mitä haasteita siinä on mahdollisesti kohdattu, ja miten se on vaikuttanut työntekijän kokonaisvaltaiseen hyvinvointiin. Erityisesti etätyön jäädessä pysyvämmäksi työtoimintamalliksi myös epidemian jälkeen.
Puolistrukturoituihin haastatteluihin osallistui 20 henkilöä, joista esihenkilöasemassa oli 6 henkilöä; naisia 12 ja miehiä 8. Keski-iän ollessa noin 45 vuotta; haastattelun kesto n. 25-45min; haastatellut edustivat useita eri toimialoja ja erityyppisiä työtehtäviä. Haastatteluista saatu materiaali litteroitiin ja analysoitiin laadullisesti temaattisen data-analyysin avulla.
Kirjallisessa raportissa tullaan tarkemmin kuvaamaan mm. toimialakohtaisia eroja tarkemmin, mutta aineistoanalyysin pohjalta voidaan jo nyt todeta, että ne noudattavat samaa linjaa kuin sähköisen kyselyn tulokset.
Yhteensä etätyökyselyyn vastasi 922 Porin kaupungin työntekijää, 69 % vastaajista ei ollut tehnyt etätyötä aikaisemmin. Ennen etätyösuositusta etätyötä tehtiin keskimäärin 0,22 päivää / viikko. Etätyö lisääntyi keskimäärin 2,27 päivää / viikko.
Tampereen yliopiston Porin yksikössä tehdään paljon myös yritysyhteistyötä tilattuina case-tapauksina. Honkajoki Oy:lle kehitetään parhaillaan luotettavaa, hyperspektrikuvauksiin perustuvaa automaattista teurasjätteiden analysointimekanismia, mitä voitaisiin käyttää hyväksi teurasjätteen jatkokäsittelyssä.
Yksikön käytössä oli Specim Oy:n hyperspektrikamera, jonka avulla voidaan linjastolta havaita teurasjätteen pilaantumisaste ja vierasesineet, kuten metalli, muovi, lasi sekä teurasjätteen vesipitoisuus. Hyperspektridatan referenssiarvoina käytetään teurasjätteestä otettuja laboratorionäytteitä, jotka on yhdessä kuvattu Tampereen yliopiston ja Specim Oy:n tutkijoiden yhteistyönä.
Hyperspektrikameran mittaukset syötetään Tampereen yliopiston neuroverkko (keinoäly) laskentayksikköön, missä neuroverkko pyrkii oppimaan syy-seuraussuhteen hyperspektrikameran mittauksien sekä teurasjätteistä otettujen laboratoriomittausten välille. Neuroverkon opettamiseen tarvitaan useita välivaiheita, sillä hyperspektridataa on paljon ja ennen neuroverkon opettamista, datan määrää täytyy vähentää kuitenkaan menettämättä mitään oleellista datasta. Tämän jälkeen neuroverkon koko täytyy selvittää ja hakea optimaaliset verkon oppimisparametrit ennen varsinaista neuroverkon opetusta. Lisäksi Dyme Solutions Oy on toteuttanut tiedonkeruuratkaisun, jonka avulla Honkajoki Oy:n tuotantolaitokselta kerätään dataa eri prosesseista yhteen paikkaan. Tampereen yliopiston tutkijat pyrkivät löytämään kerätystä datasta syy-seuraussuhteita, jonka avulla voidaan tehdä kehitystoimenpiteitä eri prosessien kohdalla, esimerkiksi energian kulutuksen tarkasteluun ja tulevaisuudessa energian kulutuksen vähentämiseen tai prosessiin liittyvien komponenttien hajoamisen ennakointiin.
Katso myös



Tilaa RoboAI:n uutiskirje
Tilaamalla uutiskirjeen saat uutiset ja tapahtumat uunituoreena sähköpostiisi ja pysyt ajan tasalla.