Koodia, hikeä ja kyyneleitä – AUV in the making
RoboAI:n laboratoriossa on käynnissä ainutlaatuinen projekti, jossa rakennetaan pienellä budjetilla vedenalaista autonomista robottia (AUV=Autonomous Underwater Vehicle). Automaatioalan insinööriopiskelija Toni Aaltonen toimii hankkeen projektitutkijana ja projektipäällikkönä. Projekti on toteutettu Ulla Tuomisen ja Satakunnan korkean teknologian säätiön apurahan turvin.


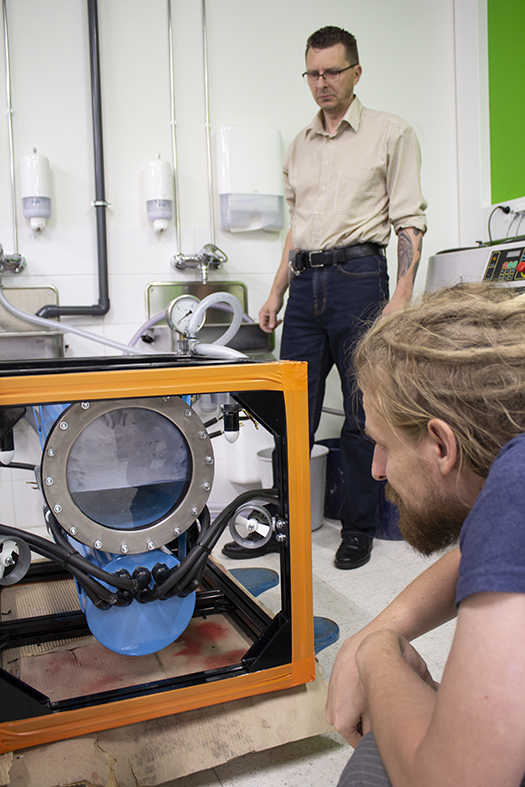
Robotin laitteistoa on päästy testaamaan yhteistyössä Satakunnan pelastuslaitoksen Rauman toimipaikan pelastussukeltajien kanssa. Kuvassa Jyri Salonen ja Marko Taskinen.
– Aihe ikään kuin tipahti syliini. Minulla oli vedenalaisia robotteja kohtaan kiinnostusta ja olin tutkinut niitä itsekseni. Täällä oli keskustelua, että AUV:n rakentaminen rajoitetuilla resursseilla olisi mahdotonta ja halusin kumota väitteen, avaa Aaltonen.
Vesi on robottiteknologialle todella haastava elementti ja juuri se tekee aiheesta Aaltosen silmissä erityisen mielenkiintoisen.
– Marsissa toimiminen on monessa suhteessa helpompaa kuin veden alla. Perusasiat pysyvät vakioina, toimii robotti sitten maalla, merenpohjassa tai avaruudessa: käytössä ovat lähes samanlaiset koneoppimisen metodit, ROS-käyttöjärjestelmä kaiken pohjana ja samantyyppisiä antureita. Vesi tuo mukanaan lisähaasteeksi muun muassa hydrostaattisen paineen, huonon havainnoinnin ja navigoinnin vaikeuden, muistuttaa Aaltonen.
Aaltosen mukaan osaltaan haastavan elementin takia vedenalaisten robottien ala on vielä lastenkengissä.
– Tällä hetkellä suurimman draivini saan aiheeseen liittyvän akateemisen tutkimuksen tekemisestä ja itseni kehittämisestä, mutta näen tällä alalla myös mahdollisuuksia yritystoimintaan tulevaisuudessa. Minua on aina kiehtonut se, missä menee se raja, kuinka paljon pystytään laittamaan koneet tekemään asioita, jotta ihmisen ei tarvitse, Aaltonen kertoo.
– Innostukseni koodaamiseen lähti siitä, kun ensimmäistä kertaa pääsin kosketuksiin Arduinoon ja raudan kautta pääsi ohjelmointiin kiinni. Täällä olen ensimmäistä kertaa kunnolla päässyt opinnoissa ohjelmoimaan, aikaisemmin olen vain opetellut itsekseni.

AUV on laajan yhteistyön tulosta
SAMKin opiskelija Marko Taskinen on suunnitellut Aaltosen vedenalaisen robotin mekaniikan ja opiskelija Antti Virtanen moottoriohjaimet. Antti Hallan panos on ollut ohjelmointiosaaminen. Robotin rungon osat on plasmaleikattu SAMK:n konetekniikan laboratoriossa ja hitsattu sekä pintakäsitelty Winnovan Porin toimipisteen konetekniikan sekä pintakäsittelyn puolella. Koneistettujen osien valmistuksesta on vastannut Tuomas Kyyhkynen, alumiinihitsauksesta Antti Salminen sekä pintakäsittelystä Isto Jokinen. Aaltonen itse on ollut vastuussa projektin johtamisesta, suunnittelusta ja ohjelmoinnista.
Robotti on rakenteeltaan perinteikäs ja muistuttaa ulkonäöltään ROV:ia (Remote Operated Vehicle), joka toimii yleensä kauko-ohjattuna työrobottina ja kaapelilla laivaan sidottuna. Autonomisten algoritmien avulla sitä voidaan ajaa veden alla itsenäisesti, ilman kaapelia. Laitteessa on kahdeksan trusteria turvakehikon sisäpuolella, joiden avulla se liikkuu kaikkiin ilmansuuntiin. Robotin erilaisilla antureilla saadaan sukeltaessa monipuolista dataa.
 Laite kuvaa merenpohjaa neljän kaikuluotaimen avulla, tuottaen muun muassa analysoitavaa, viipalemaista viistokaikukuvaa. Laitteen käyttösyvyydeksi on arvioitu noin 50 metriä, jolloin siihen kohdistuu 5-6 barin paine.
Laite kuvaa merenpohjaa neljän kaikuluotaimen avulla, tuottaen muun muassa analysoitavaa, viipalemaista viistokaikukuvaa. Laitteen käyttösyvyydeksi on arvioitu noin 50 metriä, jolloin siihen kohdistuu 5-6 barin paine.
– Laitteen suunnittelun lähtökohtana on ollut hyvä hallinnoitavuus. Muoto on hyväksi todettu ja perinteinen. Robotti ei ole virtaviivainen, koska tarkoitus ei ole käyttää sitä kovilla nopeuksilla. Laitteesta haluttiin mahdollisimman monikäyttöinen, joten siihen voidaan kiinnittää monenlaisia työkaluja ja laitteita, Aaltonen kertoo. Hän on käyttänyt paljon aikaa suunnitellessaan kaikuluotainkuvaan perustuvaa paikan ja nopeuden määrittelyä. Tämä on autonomisen robotin toimintoja ajatellen ensiarvoisen tärkeää – merien ja järvien pohjista ei ole olemassa tarkkoja karttapohjia.

Avoin data hyötykäyttöön
– Tämän AUV:n ensisijaiseksi käyttötarkoitukseksi on suunniteltu pelastustehtäviä. Suomen vesissä näkyvyys on niin huono, että viistokaikukuvaa tuottavan robotin käyttö pelastussukeltajien rinnalla voisi nopeuttaa uhrin löytämistä, Aaltonen toivoo.
Myös tutkimukselliset tarpeet sekä kiistanalaiset alat, kuten öljynporausalueen analysointi ja metallisten esineiden löytäminen merenpohjasta, eli käytännössä miinojen tunnistus, voisi olla laitteella tulevaisuudessa mahdollista.
Suunnittelussa ei ole tarvinnut lähteä täysin nollasta: Floridan yliopiston Machine Intelligence Labin vuosikymmeniä AUV-alalla tekemää työtä pystyttiin hyödyntämään, koska tutkimustiedot on julkaistu avoimesti yliopiston verkkosivuilla.
– Mitään ratkaisua ei ole lainattu suoraan, jo pelkästään budjettierojen takia. Mutta esimerkiksi trusterien sijoittelussa käytimme apuna floridalaisten tietoja, Aaltonen paljastaa.
AUV:n on tällä hetkellä testausvaiheessa ja Aaltonen toivoo laitteen prototyypin valmistuvan vuoden loppuun mennessä.
Arduino= Avoimeen laitteistoon perustuva ohjelmointiympäristö ja elektroniikka-alusta. Laitteisto perustuu 8-bittiseen Atmel AVR- mikro-ohjaimeen, jonka pinneihin voidaan kytkeä moottoreita, antureita, LED-valoja ja muita komponentteja. Ohjelmointi tapahtuu C ja C++:aan perustuvalla Arduino-ohjelmointikielellä. (Lähde Wikipedia)
Rauta=Hardware, laitteisto (Lähde Wikipedia)


![]()
Lisää aiheesta
Lue myös
Tilaa uutiskirje
Tilaamalla uutiskirjeen saat uutiset ja tapahtumat uunituoreena sähköpostiisi ja pysyt ajantasalla.