

Kokeilun alkutilanne
Biolan Oy:llä haluttiin selvittää mahdollisuutta pakkituotteiden automatisoituun lavaukseen siirreltävällä yhteistyörobottisolulla, jolloin sitä voitaisiin jatkossa hyödyntää muilla tuotantolinjoilla. Kohde sopii hyvin modernisointiesimerkin kohteeksi Teknologiayritysten modernisointi tekoälyn ja robotiikan avulla –hankkeessa, koska se sisältää monipuolisesti yhteistyörobottisolun suunnitteluun liittyviä haasteita aina tarttujasuunnittelusta robottisolun turvallisuuteen ja solun siirreltävyyteen liittyen. Kokeiluilla haettiin ratkaisuja mm. sopivalle robotin tarttujalle, robottisolun layoutille ja robottisolun turvallistamiseen.
Miksi päädyttiin tekemään nämä kokeilut?
Lavattavia pakkituotteita on kolmea eri kokoa ja lavaamiseen käytettävä robottisolu voisi parhaassa tapauksessa olla siirreltävä, jolloin sitä voitaisiin hyödyntää myös muilla tuotantolinjoilla tarpeen mukaan. Pakkituotteille soveltuvan tarttujan suunnittelussa haluttiin kokeilla:
- löytyykö sellainen tarttuja, jolla kaikkia tuotteita voidaan lavata tarttujaa vaihtamatta?
- millainen voisi olla helposti ja nopeasti vaihdettava tarttujaratkaisu?
Näillä ratkaisuilla voisi mahdollistaa lyhyemmät tuotantosarjat, kun asetteen muutos ei vie liikaa aikaa. Robottisolun siirreltävyys taas aiheuttaa omat haasteensa niin solun layoutin kuin turvallisuuden kannalta. Kokeiluissa pyrittiin löytämään toimivia ratkaisuja näihin molempiin haasteisiin siten, että robotin työkierrosta ei tule liian hidas ja robottisolun toiminta pysyy joustavana ja turvallisena.
Millaisia kokeiluja tehtiin?
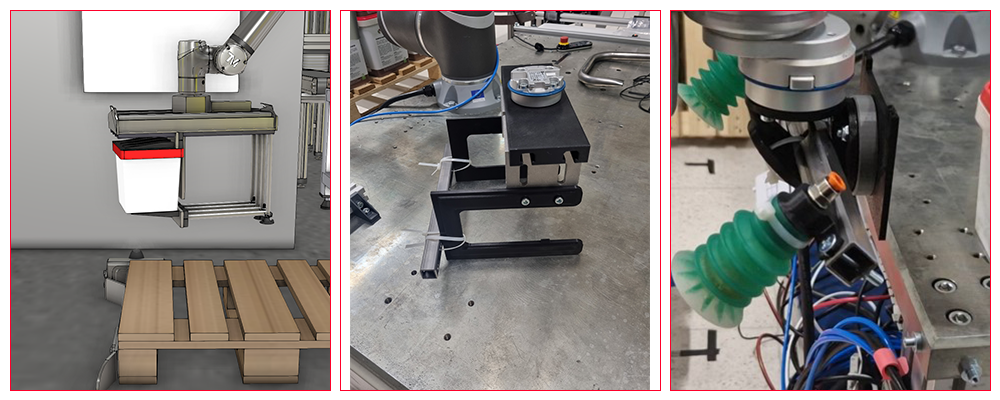
Tarttujasuunnittelussa lähdettiin selvittämään pakkituotteista löytyviä yhteisiä piirteitä, joita voitaisiin hyödyntää niihin tarttumisessa. Kannesta tarttuminen ei tullut kyseeseen, joten tartuntakohdan vaihtoehdoiksi jäivät pakkien pohja tai yläreunasta löytyvä kaulus. Tältä pohjalta tehtiin prototyyppejä kolmesta erilaisesta tarttujasta (kuva 1), joita kokeiltiin sekä oikealla robotilla ja pakeilla, että simulaatiossa erilaisissa robottisolun layouteissa törmäyksien varalta.
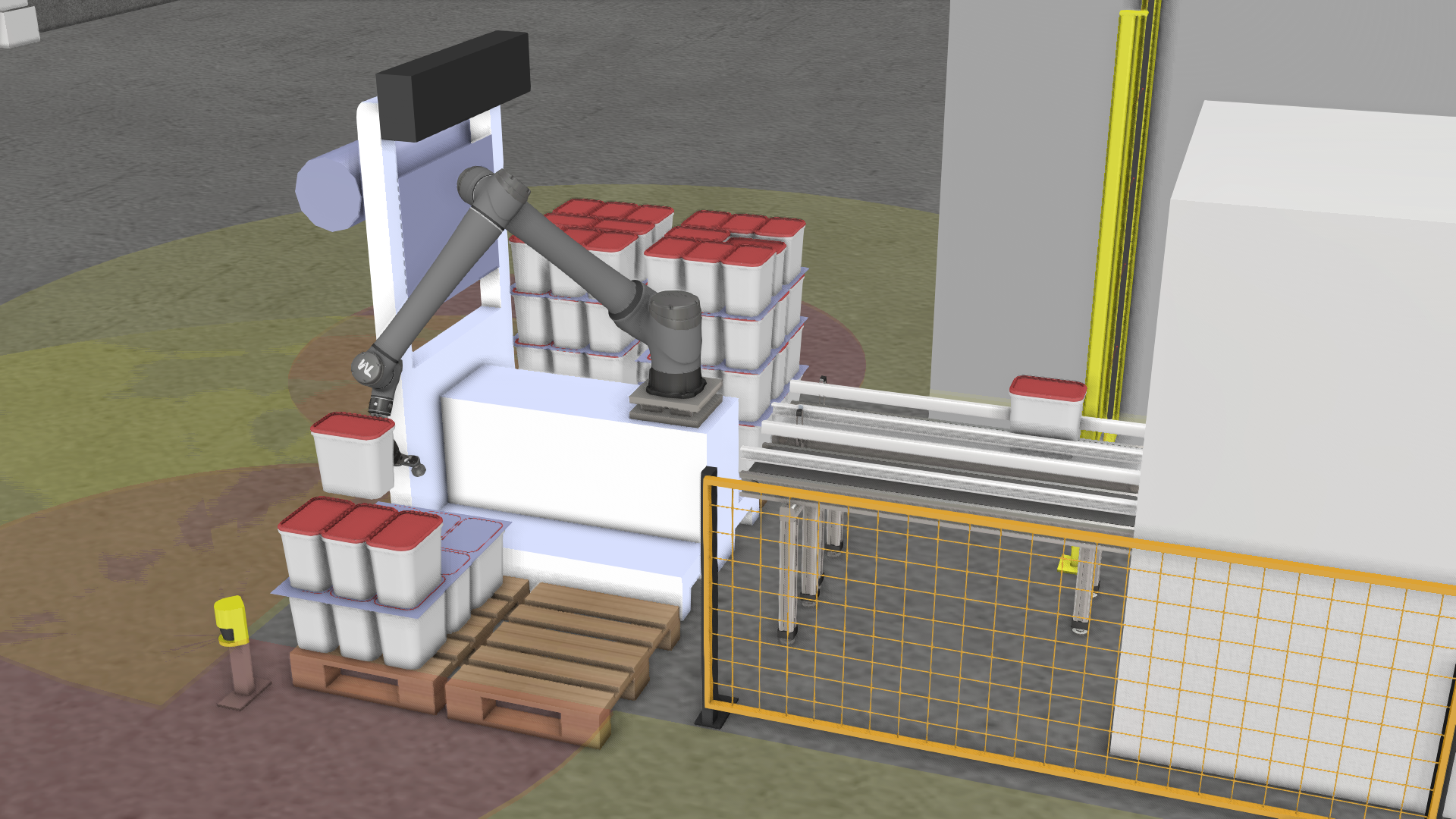
Robottisolun rakennetta ja layouttia suunniteltiin ja kokeiltiin simulaation avulla (video 1). Simulaatiossa voidaan kokeilla ja vertailla eri robotteja ja layoutteja suhteellisen nopeasti, kunhan simulaation pohjaan on tehty valmiiksi robotin ohjelmat ja simulaation toiminnallisuuden rakenne.
Video 1: Pakkitarttujan, lavaussolun layoutin ja turvallistamisen kokeiluja simulaatiossa.
Tämän jälkeen kokeiluissa voidaan esimerkiksi vaihdella lavapaikkoja, tarttujia ja robottisolun sijaintia toimivaa ratkaisua haettaessa. Simulaatiossa kokeiltiin myös erilaisia vaihtoehtoja robottisolun turvallistamiseen ja niiden vaikutusta mahdollisiin tuotantokatkoihin lavaussolussa (kuva 2).
Kokeiluissa kevyiden pakkien lavauksessa robotilla törmättiin haasteisiin välimuovin käyttämisessä pakkikerrosten välissä (video 2). Kevyet pakkituotteet eivät painuneet kunnolla edellisen pakin päälle ja muovin kiristyessä pakkikerrokset eivät aina pysyneet siistinä.
Video 2: Haasteet välimuovin käytössä kevyiden tuotteiden kanssa.
Seuraava video (video 3) esittelee yhden haasteeseen löydetyn ratkaisun. Pakit asettuvat lavalle kerroksiin paremmin käyttämällä muovikalvon sijasta esimerkiksi pahvia. Jäykkä pahvi voi korjata myös mahdollisia lavan korkeuden vaihteluita.
Video 3: Välimuovin ja välipahvin käyttö lavauksessa.
Kokeilujen lopputulokset
Tarttujakokeiluissa saatiin suunniteltua kaksi tarttujan prototyyppiä, jotka molemmat toimivat hyvin erikokoisille pakkituotteille pakin kauluksesta tartuttaessa ja voisivat jatkokehityksen avulla mahdollistaa tuotteiden automaattisen keskittämisen niihin tartuttaessa. Jos päädytään käyttämään erikokoisia tarttujia erikokoisten pakkien kanssa, on tarttujan vaihtaminen robotin työkalulaippaan kiinnitettävän pikavaihtajan ansiosta todella nopea prosessi. Robottisolun simulaatiossa tehdyillä kokeiluilla saatiin muodostettua suunnitelmia lavaussolun layoutille ja turvaratkaisujen sijoitteluille/valinnoille. Välimuovin kanssa löytyneisiin haasteisiin saatiin kokeiluissa löydettyä toimiva ratkaisuehdotus.
Kokeilut johtivat pakkituotteiden lavauksen ja turvallistamisen testaamiseen yhteistyörobotilla. Tästä tehtiin Teknologiayritysten modernisointi tekoälyn ja robotiikan avulla –hankkeeseen yksi Proof of Concept –pilotti.
Kiitokset Biolanille hyvästä esimerkkitapauksesta!

