Co-operation cases
RoboAI co-operation cases combine the needs of the companies, the expertise of the professionals and the fresh and innovative views of the students.
Co-operation cases are an important part of RoboAI activities. Experts produce and test new research data with projects to be used by the companies. Academy students get to learn, innovate and try new ideas in the cases in a practical manner. This page shows our latest and most significant cases.
RoboAI Industry
Robotics Academy was commissioned by Boliden Harjavalta nickel smelting plant to utilize machine vision in their process. The possibilities of machine vision were studied by students. The aim was to deploy machine vision to study the concentrations of different constituents in slag after the smelting process.
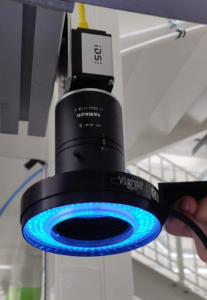
A system where computer vision is applied for industrial purposes is called machine vision. The system consists of a light source, a target to be imaged, a camera, a computer with an image processing software that automatically interprets the image.
Machine vision systems mainly execute tasks that are strictly pre-programmed. In this commission concentrations given by the customer were recognized on a conveyor belt. The used application was Cognex application In-Sight. In a smart camera all the image processing and calculations happen in the camera itself.
During the project the students learn how to utilize different camera and light options. As a whole, the project gave mutual benefit. The competence of the students grew and the commissioner received the information they hoped for. With the knowledge gained, projects requiring machine vision can be met better.
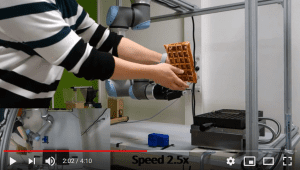 Robotics does not only refer to assistive devices used in industry. Robotics can also be utilized in more everyday tasks, and that´s what Robotics Academy students were commissioned to find out. A group of students started researching the possibilities of using UR5e collaborative robot at a café, especially in making coffee and waffles.
Robotics does not only refer to assistive devices used in industry. Robotics can also be utilized in more everyday tasks, and that´s what Robotics Academy students were commissioned to find out. A group of students started researching the possibilities of using UR5e collaborative robot at a café, especially in making coffee and waffles.
Group members Pietari Pulkkinen, Jukka-Pekka Rajahalme and Timo Virtanen started the project by collecting all the necessary equipment to create a demo café. An old Moccamaster coffeemaker was found on the campus, and the commissioner provided the group with a Belgian waffle iron, a real “Mercedes Benz” in the field. For the robot to work smoothly in the kitchen, the group had to design and 3D-print auxiliary devices suitable for a finger gripper, e.g. a new handle for the coffee pot.
Once the demo café was completed, programming the functional features of the robot was a smooth operation for the group, and the robot carried out the tasks brilliantly. Among the industry-centred projects, making waffle was a nice and tasty change. Besides, having coffee has always belonged to the life of engineering students.
Based on the demo, the students believe that the UR5 collaborative robot is well suited for tasks at a café.
– UR5e is suitable for simple and repetitive tasks at a café. Besides the tasks conducted in the demo, the robot can be used for e.g. spreading dough with suitable tools, pouring different drinks, cutting cakes and pies, and decorating cakes, Pietari Pulkkinen lists.
The case was commissioned by Hangon Vohveli and its owners Aarno and Leena Törmälä. The commissioners were happy with the cooperation, and they intend to employ the robot in café tasks at their café.
– Working with the students was a pleasure. They were self-starters and really aimed at finding a functional robotized solution for making coffee and waffles at our café. Our intention is to realize the robot solution, if not yet next summer but at a later stage. Besides functionality, it will be a nice sight for the customers and we can all learn the kind of assistive tasks the robots are already capable of, Aarno Törmälä tells us.
This robot experiment was carried out as a part of the HLS robo project, which has been granted co-funding from Rural Development Programme for Mainland Finland 2014 – 2020.
Robotics Academy was commissioned to assemble certain magnets to a required length and form. The possibilities to use an industrial robot for this purpose were studied by students. The goal was to research whether this given task could be implemented by using different industrial robots.
 An industrial robot is a computer-controlled machine that can execute the same repetitive task with the same accuracy and speed several times. An industrial robot is a general-purpose machine, and the same robot can execute several different tasks, depending on the program and the purpose.
An industrial robot is a computer-controlled machine that can execute the same repetitive task with the same accuracy and speed several times. An industrial robot is a general-purpose machine, and the same robot can execute several different tasks, depending on the program and the purpose.
The commissioner was Neorem Magnets, the only magnet factory in Finland. Their main products are different magnets and magnetic solutions, and they produce high-quality magnets for the different fields of industry utilizing state-of-the-art technology in the field.
Two robots were used in the project: UR-5 and ABB IRB-120. The robot chosen to finalize the project was UR-5 because it met the requirements and hopes of the commissioner better. UR-5 is easy to program and sufficiently fast to execute the task in question.
 In the project the students learned how to program and utilize the different features of the robots in an industrial environment, as a whole the benefit gained was mutual. The students´ competence grew remarkably, considering that this project was the first touch to the wonderful world of robotics to some students. With the competence gained, future robotics challenges can be met even more efficiently.
In the project the students learned how to program and utilize the different features of the robots in an industrial environment, as a whole the benefit gained was mutual. The students´ competence grew remarkably, considering that this project was the first touch to the wonderful world of robotics to some students. With the competence gained, future robotics challenges can be met even more efficiently.

Robotics Academy got a challenge from Neorem Magnets connected to measuring the dimensions of the magnets. The dimensions of the polygon-shaped magnets should be measured with the accuracy of hundredths of a millimeter.
The challenge was tackled by first conducting a project, where Belgian and Spanish exchange students studied how the measuring of magnet dimensions could be executed by a smart camera. Already at the beginning of the first project it was known that even the best of smart cameras with the highest of resolutions were not accurate enough for the accuracy of hundredths of a millimeter. The goal was set to find out what kind of tools and setup were needed for the measuring to succeed.
At the beginning of the project Colin and Nicolas from Belgium and Jaime from Spain got acquainted with the analysis program of the smart camera and built a setup to be able to capture an image of the magnet as precisely as possible, in stable conditions and repeatedly. When the basic functions of the analysis program had been studied, they started to execute the measuring program. With the measuring program, machine vision system recognizes a piece, finds its edges and measures the distances between the edges in relation to each other, and measures the angles between the edges. When the program was ready, the students tested imaging and measurements by measuring all the pieces three times on both sides. Thus, data was received on the repeatability and measurement error of the analysis program.
Based on this first project, the results showed that measuring of magnet dimensions was possible by machine vision, and by measuring technique the repeatability and speed of the measuring process could be improved. Based on this project, the goals of the next project were defined, i.e. building more precise imaging arrangements and an applicable analysis program. Moreover, designing a more accurate image jig was set as an objective, as it helps to stabilize the magnet on the imaging platform.
Implementation of the first project was a very pleasant project work for the exchange students. They learned how to program smart camera analysis program in an environment previously unknown to them. They also genuinely focused on presenting the results concerning different pieces and measurements.
“The students had created a really impressive program in a short time and a lot of data was compiled for the report, which is particularly valuable when evaluating the functionality of the program and analyzing the areas for improvement. With cooperation we will receive valuable information on different machine vision systems and their price categories and applicability for our different needs to support the investment decision.”
Jukka Hissa
Production development engineer
Neorem Magnets
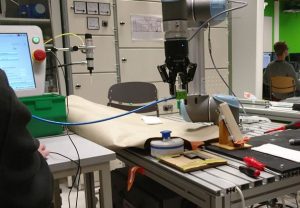
The Robotics Academy was commissioned to study the illumination of aluminium profiles for a machine vision system. Five different shapes of aluminium profiles with eight different illuminations were photographed. Scratches, bubbles and seams on the profiles were highlighted. The project team investigated the behaviour of different lighting methods when photographing aluminium profiles moving on the line. The project team consisted of Atte Ali-Hokka, Meeri Simberg, Toni Seessalo and Markus Virtanen.
The client company is a software developer and it is not profitable for them to focus their resources on lighting research. For students, such projects provide excellent opportunities to get hands-on research.
The project team started their research by learning about different lighting techniques such as direct, dark field and diffusion lighting. The team then looked at other factors that influence shooting, such as the colour of light, camera focus and the presence of external light in the shooting environment.
Aiming for sufficient contrast
As the surfaces of the aluminium profiles were colourless and glossy, the different light colours do not highlight the defects under investigation. Illuminating profiles of different shapes proved challenging and optimal illumination is not feasible with a single lighting technique. The optics used were motorised optics that could focus on the height of the profile on the surface being photographed, leaving the students to work out how to produce maximum contrast on objects of interest to the company.
After preliminary research and optimization of the test environment, the team conducted a test run in which the profiles moved across the illumination and the camera captured the flawed surface of the profiles. After collecting the image data, the team performed an analysis of the images, considering the impact of the shape of the tracks, sufficient contrast and human error on the test results. When all profile characteristics were taken into account, side lighting proved to be the best of the eight lighting options. Side lighting provided the best contrast for the image area.
 Robotics Academy was commissioned by Oras Group to research the suitability of a robot for assembly work. The goal was to automatize a five-part assembly line utilizing an assembly robot.
Robotics Academy was commissioned by Oras Group to research the suitability of a robot for assembly work. The goal was to automatize a five-part assembly line utilizing an assembly robot.
The robot chosen for the project was a dual-arm YuMi robot, which has been developed to assemble small parts. The robot capable of real cooperation has arms that change position flexibly, part location function based on camera and a precise control system.
In the project, the tasks of Robotics Academy students included the programming and simulation of the robot, utilization of machine vision and the design and implementation of the parts connected to the robot, i.e. jigs, pallets, and layers, by 3D-printing. The project gave the students a possibility to comprehensively learn the functioning and limitations of the robot. The primary goal was reached, i.e. the assembly task was executed by the robot.
“Cooperation with Robotics Academy was easy and we were on the same wavelength already at the first meeting. The assembly of our product varies and with this project we definitely became aware of potential new ways of functioning. The results were interesting and they are a good basis for further consideration. I believe both cooperation parties gained benefit from the project.”
Maarit Ruohola
Oras Group
The students of the Robotics Academy received a commission from Satakunnan Osuuskauppa: a robot to guide customers at Prisma Rauta in Pori. The aim of the project was to design and implement a mobile robot application that would allow the customer to ask for the location of a specific product in the renovated Prisma Rauta store and then the mobile robot would guide the customer to the correct shelf.
Students from the Robotics Academy used an Omron mobile robot and an application was built around it. Omron's mobile robot is well suited for routine material handling, for example. The mobile robot maps its environment and is then able to navigate it autonomously. The robot can also be programmed to communicate with its waypoints. The robot is equipped with laser sensors that allow it to avoid people or other obstacles in front of it.
For customers, a stand with a tablet was attached to the robot. Using the tablet, customers could select the product category they wanted (e.g. laminates) and the robot would then go on to guide the customer to the right place. The client wanted the user interface to be simple and clear. The students created the landing page, the product search page and the help page with these wishes in mind. They also created a page that showed in real time where the robot was going and when it would arrive.
One example of a 5VTA project was the automation plan for the packaging line at Pekka Parhaat bakery. The plan was drawn up to find out how the cutting and packaging of the bakery product could be made possible and what the costs of different levels of automation would be. The automation plan was also the subject of a thesis by Jenni Alatalo, a student at Satakunta University of Applied Sciences.
The study identified the most suitable equipment in terms of production volumes, estimated the purchase price of the investment and finally carried out a simulation according to the automation plan. The aim is that automation would allow more efficient use of time, savings due to faster packaging and an increase in production volume.
In the selection of the equipment, attention was paid not only to the price of the equipment but also to its suitability for the bakery environment, where hygiene is particularly important. The space required by the equipment is also an important factor in ensuring a comfortable and safe working environment. A major advantage in the choice of equipment is that it can also be used in the production process of other products, if necessary. In this way, the return on investment is greater.
Three different levels of automation were planned:
- In the first plan, all the cutting and packaging steps will be automated using automated machines provided by bakeries. The only manual operation is the transfer of the packaged products into a cardboard box.
- In the second plan, cutting is done by a collaborative robot and a dedicated cutting tool. The same robot also transfers the cut products into individual packs that pass through a flow-pack packaging machine. The products pass from the packaging machine to a rotating table, which is emptied into boxes by a worker at appropriate intervals.
- The third plan uses only the flow-pack packaging machine and the rotating table behind it. This means that cutting, packaging of individual products and boxing of plasticised products is done manually.
When a cost calculation was made on the basis of these plans, it was found that the automation cost of the first plan would be well over €200,000, excluding installation and programming costs. The total cost of the equipment under the second plan is just over €70 000 and the equipment under the third plan just over €40 000. On the basis of these plans, the second option proved to be the most cost-effective solution in this situation.
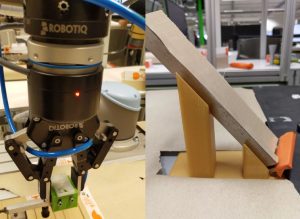
The 5VTA project decided to run a simulation of Option 2 (Figure 1) to demonstrate how such an automated line system would work. The simulation was performed with Visual Components using generic components, i.e. machines and equipment that are readily available in the software. As a result, the simulation does not depend on specific manufacturers' equipment and the dimensions can be adapted to match the dimensions of the designed equipment. The collaborative robot used in the simulation is the UR5 robot and the robot gripper is a Robotiq two-finger gripper, which is particularly well suited for this purpose.
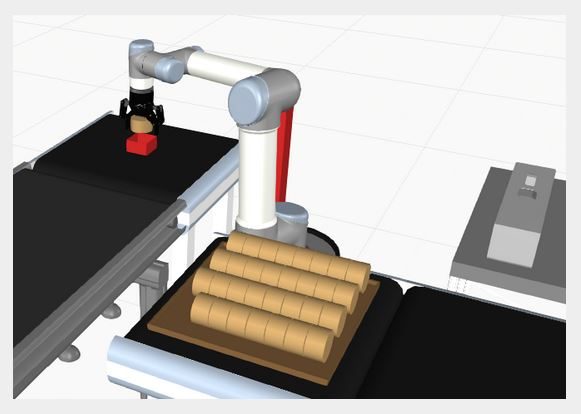
The simulation was initially carried out using a multi-blade cutter designed for this purpose.
After modelling and 3D printing an example version of the multi-blade cutter, the cutter was tested in real life with the Universal Robots UR5 collaborative robot in SAMK's laboratory. The tests showed that the multi-blade cutter does not work as designed, the blade spacing causes too much resistance and the force of the robot is not sufficient to cut the whole product at a time.
Based on the first simulation, it was decided to run another similar simulation where the robot uses a single blade to cut. The single cutting blade was also verified with a real robot and was a viable solution.
Simulations and real tests with the robot provided convincing evidence that the second plan is the preferred solution. All the desired processes can be automated, but the cost of the equipment is reasonable.
For a more detailed description of the example presented here, see Jenni Alatalo's thesis

In this example, a 3D camera based on laser scanning guides a collaborative robot to pick up and pack packages of cold cuts on a conveyor belt into boxes.
3D imaging plays an important role here by identifying the size, height and position of the toy pack on the conveyor, so that the robot can always pick up at exactly the right spot. Such an application could be on a production line where different packages of different sizes are being packed at the same time, because 3D imaging provides the robot with information about which package is being packed for each package, enabling the robot to pack similar packages in the same box or to assemble boxes containing several products as ordered.
In this example, various bakery products are handled with a robot gripper, whose gripping force can be precisely adjusted so that products that easily change shape do not warp or flatten.
The bakery products in the example are a doughnut and a mini doughnut. A light touch gripper is used in this example:
- For handling doughnuts by lifting them from the inner edge of the hole.
- To handle doughnuts by lifting them from the outer edges.
Such light contact grippers allow flexible production, as they can handle a wide range of shapes without affecting the shape of the products. This allows the line to handle several different products at the same time.
The positions of doughnuts and doughnuts are identified here by PickIt's 3D camera, which guides the robot to pick up the bakery products from the right place.
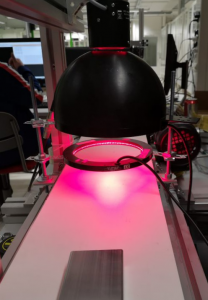
In this example, a machine vision system was designed and implemented to guide a robot to pick up chocolate bars from a line and pack different flavoured chocolate bars into their own boxes.
The machine vision system was implemented as a traditional machine vision system, consisting of a machine vision camera, a Led light illuminating the chocolate bars and an analysis program running on a computer. The machine vision camera always images the chocolate bars at the same point on the conveyor (picture 1).

The analysis software, running on a computer, then identifies the taste of the bar from the packaging and the position of the chocolate bar on the conveyor (Figure 2). When the robot receives the coordinates, it picks up the chocolate bar from the conveyor and packs it in the correct box according to the taste information.

When you want a mobile robot to transport food packages to a boxing facility or boxes to a palletizing or shipping facility, the mobile robot needs to be called to transport the products when needed.In the 5VTA project, an exemplary calling application for a mobile robot was developed.
With the call application, the worker can call the mobile robot to pick up products, for example from the packing machine to the palletiser. The invitation application (Picture 1) runs on a mobile device and allows the worker to choose where the mobile robot is invited and where it is sent when the products are picked up. The invitation app can also be used to make a reservation for the robot, i.e. if the robot is in motion, it can be booked to come to the next designated location. The app can also be used to route the robot so that it can move automatically from one point of operation to another, or even to a packing station and then to a dispatch centre.

RoboAI Health
Dyme Solution Oy's Florie pressure sensor was tested in the spring of 2023 in the Naskali residential unit of the Developmental Disability Services of the Satasairaala hospital.
The aim of the test was to evaluate how the sensors placed at the foot of the bed enable real-time monitoring of movement and its impact on the night-time safety of the residents and the night-time peace of mind of the entire unit. The functionality and usability of the Florie sensors as a product and the user-friendliness and functionality of the user interface were also evaluated.
In the test, sensors were installed under the feet of the bed of a resident in the Naskali housing unit, which, through changes in weight, detect when the resident leaves the bed and send the information to Dyme Solution Oy's cloud service. Carers were alerted to the bed exit by an app downloaded to their mobile phones.
The product was found to be particularly suitable for residents with poor balance who are at risk of falling, "poor footed" but who are alert or restless at night or may struggle to get up despite being on the edge of the bed. The product is useful when the unit is large, with long distances to cover, a lot to do at night and few staff to supervise.
Henna Leppänen's Master's thesis on Florie (Theseus, in English)
Research centres as business partners - RoboAI and Dyme Solutions Ltd (Youtube, in Finnish)
More and more people are facing mental well-being challenges in their everyday lives. For example, fear of social situations, performance anxiety and stress are common for many. For young people in particular, new solutions are needed to support traditional pen and paper methods. Technology offers much-needed low-threshold tools to work through these challenges.
Cost-effective and accessible solutions to promote mental well-being.
Exposure
Exposure therapy is one of the most effective methods of treating anxiety. Studies show that 60-75% of people treated with exposure therapy experience some relief and the effects are long-lasting. Exposure therapy is based on confronting fear. When a person is exposed to the object of their fear for long enough, the mind adapts to the fearful stimulus, so that it no longer causes stress. Virtual reality is a potential tool for exposure therapy because it can be used to create authentic experiences in a safe environment. The digital environment also allows for a wide range of modifications (e.g. adjusting the amount of stimuli and the progression of the situation) that are difficult or costly to implement in the real world (cf. e.g. fear of flying and flying).

Example: Exposure app for fear of public places
In the demo, the user shops in a store. His goal is to queue and pay for his purchases. The demo uses a real 360 image viewed through virtual glasses. In the demo, the user can progress from one interaction (go to the queue) to another (deal with the salesperson) at his/her own pace. The purpose of the exercise is to elicit an anxiety response, wait for the stress to subside and then proceed one step at a time, at your own pace.
Relaxing
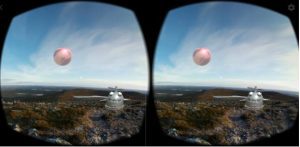
VR can also be used to support relaxation. The user can be virtually transported to a variety of relaxing environments (e.g. nature). Various therapeutic tools can be added to the virtual world to enhance relaxation and recovery. For example, breathing exercises in the virtual world can be used to activate the parasympathetic nervous system to promote recovery.
Example: breathing exercise
The relaxation demo uses an authentic 360 image shot in a mountain landscape in Lapland. The relaxation exercise is guided by a character built into the demo. In addition, the demo uses a ball that increases and decreases in rhythm to control breathing to enhance relaxation and recovery.
"At its best, virtual reality offers a whole new range of possibilities, including exposure therapies. The use and continuous development of virtual reality and various technological applications is a reality of today and the role of technology in psychiatric care is only likely to grow in the future."
Anna Mäkelä
Specialist in Adolescent Psychiatry, Senior Physician, Satakunta Hospital District, Pori Adolescent Psychiatry Clinic

The rehabilitation field needs new ways to support independent rehabilitation. However, the clientele is very heterogeneous, with individualised functional capacity and rehabilitation needs. Games make use of many elements to increase motivation, enthusiasm and engagement. Games can also embed 'benefit' elements, and are typically referred to as 'benefit games'. The challenge with utility games is to adapt the content of the game to different user groups. In particular, there is a need for a modular solution that can be adapted to the user.
The idea of the game is to engage the user in light physical exercise while at the same time training coordination and perception. For the most severely disabled, the key objective is to engage and enable new experiences.
Controllers
To increase physical activity, body movements are used to control the game. The game is controlled by a small position sensor (tilt sensor). The sensor data is sent via Bluetooth to the mobile device where the game is installed. The sensor can be attached to different limbs or different objects that the player moves. In this way, the required steering movement can be modified according to the user's needs. Modularity can be increased through customisable controller solutions that are 3d printed. 3d printing allows for the production of fully customised controllers, as long as the sensor can be attached to the controller.
The 3D printing technology chosen is FDM (fused deposition modelling), where a plastic wire fed into a nozzle is heated to a temperature suitable for the material. The molten plastic is then extruded onto the printing substrate in layer after layer, eventually forming a complete part. PLA (polyactide) was used as the printing material because of its printing properties, such as low printing temperature and its dimensional accuracy.
Here, the following were used as example guides:
- a balance board, allowing movements to be made with the feet (sitting on a chair or standing
on the balance board)

- hand controllers with multiple ways of gripping (handles can be interchanged and the control can be attached to the body)


- with a head control, allowing you to steer without using your hands and feet

Games
As an example game, a simple maze game was implemented where the player (mouse) is supposed to collect hearts (picture). The game can be adjusted for different users. For example, the size and speed of the game elements, the number and location of mazes, and the number/quality of opponents can be easily changed according to the user's needs. The key is to match the difficulty level with the player's abilities. The game was implemented to be adaptive - it adapts to the player's abilities by increasing the difficulty level through the use of opponents and mazes. However, the game starts as simply as possible without mazes and opponents. This allows people with perceptual and motor challenges, for example, to concentrate on collecting the first heart of their game, without the game's difficulty killing their motivation. On the other hand, the advanced player will not get bored, as the game automatically becomes more difficult as more hearts are collected. The same control technology can be used with a wide range of different games and is currently being worked on.

"It is important that rehabilitation is also fun. Games are a good tool for making it more meaningful. We have introduced new tools both for individual training and as part of groups."
Helena Myllymäki
Quality Manager and Occupational Physiotherapist, Kankaanpää Rehabilitation Centre
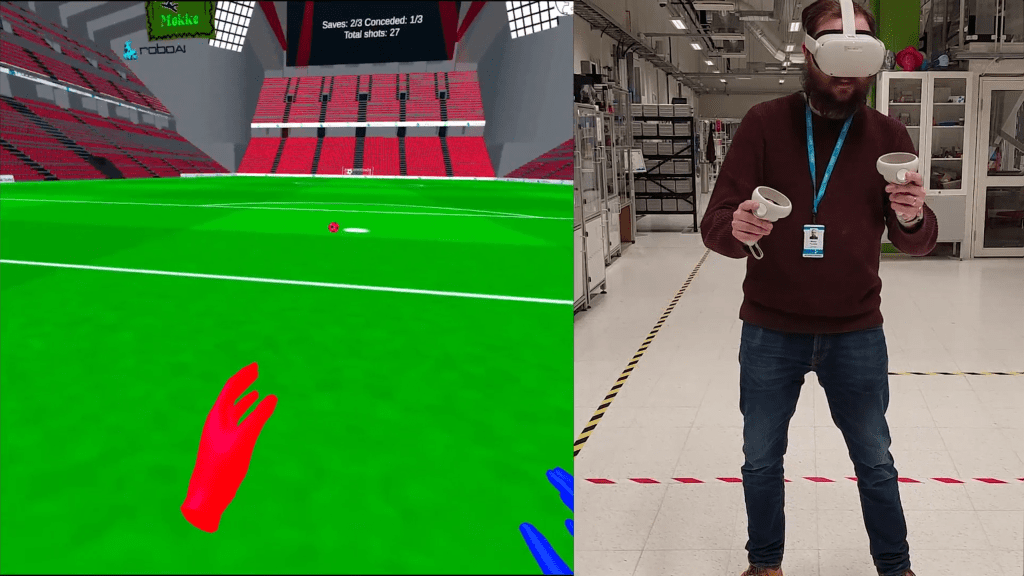 In cooperation with RoboAI Health and Rauma Fysikaalinen Hoitola Oy, a virtual reality-based rehabilitation game Mokke (Goalie) was developed. The development was driven by the leading idea of adjustable features according to the client's individual goals and the use of motion data during gameplay. An essential part of the game's suitability for therapeutic use is the ability to control the game's settings externally.
In cooperation with RoboAI Health and Rauma Fysikaalinen Hoitola Oy, a virtual reality-based rehabilitation game Mokke (Goalie) was developed. The development was driven by the leading idea of adjustable features according to the client's individual goals and the use of motion data during gameplay. An essential part of the game's suitability for therapeutic use is the ability to control the game's settings externally.
The need to develop the game arose from the owners of Rauma Physical Therapy Ltd's (RFH) idea to introduce a virtual game that activates the whole body and especially the lower limbs. The Mokke game developed at SAMK is controlled by the upper limbs, but the lower limbs can be activated as required or the exercise can be done sitting down. The RFH physiotherapists wanted the game to be simple but challenging for the client and individually adjustable to maintain motivation for the game and ensure that the training was goal-oriented. Monitoring recovery and goal achievement requires measuring and observing the client's activities. It is therefore important for physiotherapists to be able to see the data on range of motion, range of motion, speed and accuracy that is accumulated through play.
The use of virtuality in rehabilitation, especially "immersive virtuality" using VR glasses, reduces pain perception (Wong, Tse & Qin, 2022). In the Mokke game, the training aims to activate the client to move and perform exercises with natural movement pathways with less pain perception. During the game, the trainee may perform larger ranges of motion and more repetitions than in a traditional exercise format.
A personalised and fun way to rehabilitate 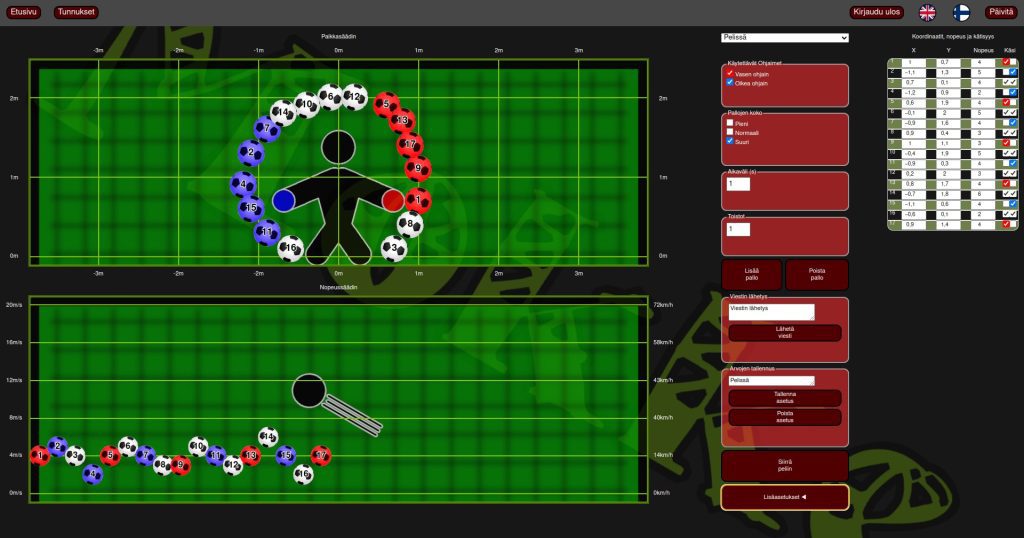
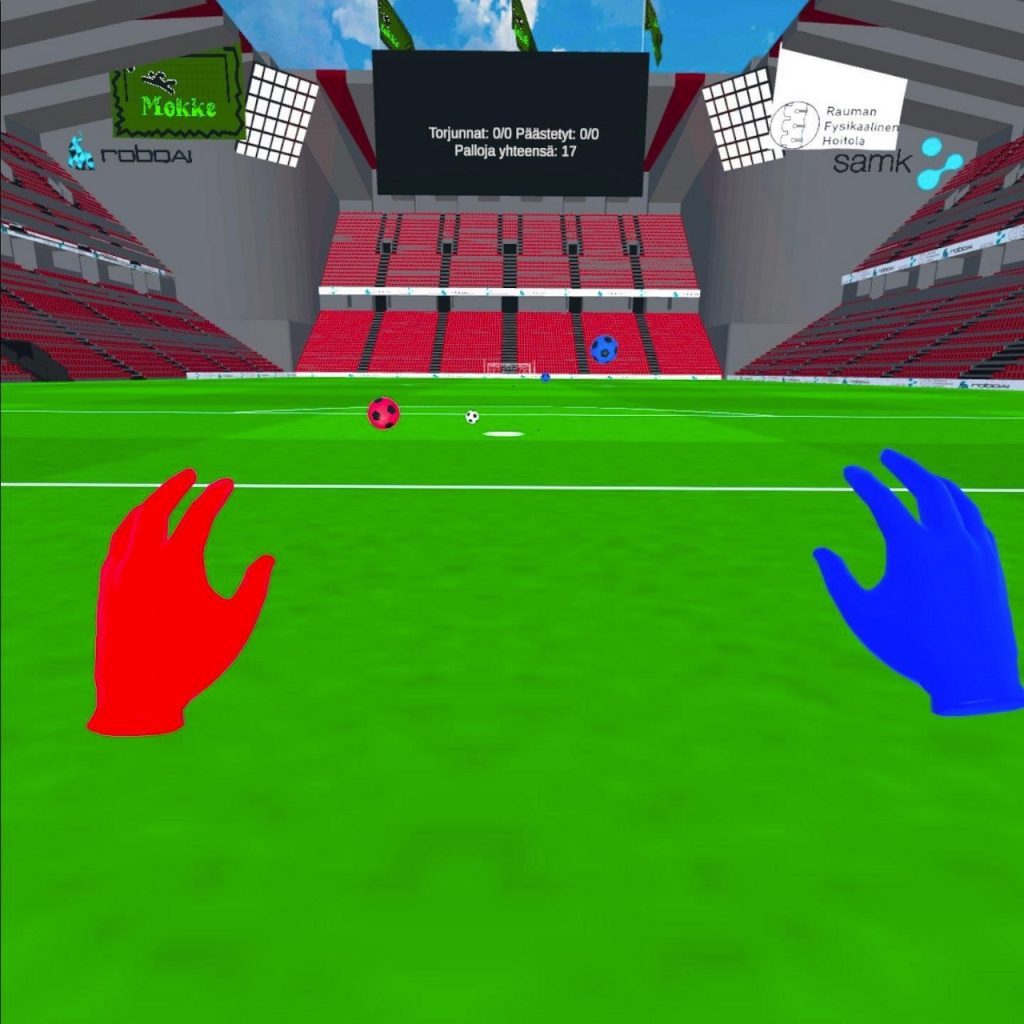
In the Mokke game, the rehabilitee acts as a football goalkeeper using virtual glasses (Figure 1). A key feature of the game is the ability to adjust game settings using a remote control app (Figure 2). For example, by adjusting ball arrival times, positions, speeds and ball size, the settings can be adjusted from a physiotherapy perspective to suit the needs and goals of the rehabilitee.
The game itself collects data generated by the virtual laser controllers for analysis by the physiotherapist. Data is collected on the position of the controllers, the speed and acceleration of movement. The remote control application displays the maximum and minimum values of movement frequencies, maximum and minimum speeds, exercise duration and the number of balls intercepted in the coordinate system. In addition, visual descriptions of the position and speed data of the controllers are provided. The exercise data collected in the database will be used to monitor the progress of the exerciser and to plan new exercises.
 The training area must be large enough to use the full capacity of the game. A football goal in this game is therefore equivalent in size to a real football goal. However, it is possible to play in a smaller area, so that the regulations can be adapted to the needs of different clients. Further development of the game is possible and the use of lower limbs as controls would be an interesting variation. At this stage it was not yet possible to attach the controllers to the lower limbs, but different sensors or attachment mechanisms could allow this.
The training area must be large enough to use the full capacity of the game. A football goal in this game is therefore equivalent in size to a real football goal. However, it is possible to play in a smaller area, so that the regulations can be adapted to the needs of different clients. Further development of the game is possible and the use of lower limbs as controls would be an interesting variation. At this stage it was not yet possible to attach the controllers to the lower limbs, but different sensors or attachment mechanisms could allow this.
RFH physiotherapists Hannakaisa Mäkitalo and Hanna Teerialho think that the Mokke game is an interesting addition to rehabilitation, as is the whole world of VR in general. The game could also be used in other sports, such as volleyball or ice hockey. It would be great if it were possible to choose between different sports in the same simulation."
The Mokke game has been developed in a project funded by the Ministry of Education and Culture (Special grant for the development of competence and network development in higher education in early childhood education and care and education personnel) called Network cooperation to boost the accessibility of AI-based virtual technologies in rehabilitation.
The Mokke game has also been tested as an aid to goalkeeper coaching at Pallo-Iirot Football club. Read more about this on the Satakunta Testbed website!
Further information:
Taina Jyräkoski
taina.jyrakoski@samk.fi

SAMK implemented the testing of the Vitacam application in May-August 2024 in cooperation with Diakon Services. The testing provided valuable information on the usability and usefulness of remote measurement of vital functions in the context of home care. Vitacam is a medical software device that measures vital functions (respiratory rate, pulse, heart rhythm) using a web or mobile camera. The aim of the testing was to assess the application's suitability for monitoring early changes in the well-being of elderly people.
Implementation of the test
12 independently living elderly people and two nurses participated in the test. The testers used the app for two months and took measurements at least three times a week. The nurses received weekly reports of the measurement results and responded to any abnormal values as necessary.
Key findings
- Testers found the app easy to use and useful.
- Measurement success rates were high (pulse 99%, respiratory rate 95%).
- Technical challenges were mainly related to updates of the app and the use of phone cradles.
- Testers needed clearer instructions and more information on the measurement values.
Conclusions
The Vitacam app is well suited for stand-alone monitoring of vital signs. Further development is recommended to improve the instructions for use, to make the monitoring of measurement results more intuitive and to develop additional guidance on measurement conditions. These recommendations have already been taken into account in the further development of the application.
You can read more about the case on the Satakunta Testbed website (In Finnish)
 In January-February 2024, the IKI project of Satakunta University of Applied Sciences tested Tactic's games with elderly people in Diakonkylä apartments. The purpose was to find out how the games could be developed to suit this target group. Kimble, Kimble Junior, Find and Find! Nature Trip and the Ötökät memory game were tested in five game events. There were a total of 56 participants, and they played in groups of 3–4 people. Project workers supervised the games and collected feedback. Some of the players required operational management during the game.
In January-February 2024, the IKI project of Satakunta University of Applied Sciences tested Tactic's games with elderly people in Diakonkylä apartments. The purpose was to find out how the games could be developed to suit this target group. Kimble, Kimble Junior, Find and Find! Nature Trip and the Ötökät memory game were tested in five game events. There were a total of 56 participants, and they played in groups of 3–4 people. Project workers supervised the games and collected feedback. Some of the players required operational management during the game.
Key findings:
- Visual perception: In some of the games the font size of the instructions was too small and the score sheets were difficult to read. The white sand on the hourglass was hard to see, suggest black sand. On the board, green, blue and purple were mixed and the lighting reflected distractingly off the boards.
- Cognition: some images were unclear or difficult to perceive, and naming the images could help players. In the memory game, the number of cards divided opinion - the instructions could include a recommendation to start with a smaller deck. The rules of the games should have different levels of difficulty.
- Physical activity: the cards were mostly easy to handle, but were too small for people with motor challenges. The game boards moved on the table, and sliding barriers could be added underneath them. The buttons were too small for many people and it was difficult to turn the hourglass.
- Social situation: playing together was perceived as socially rewarding, but the possibility to play alone should also be mentioned in the guidelines.
The testing shows that Tactic games have potential to engage older people, but clearer instructions, stronger visual contrasts and more physically accessible components are suggested to improve accessibility and usability.
You can read more about the case on the Satakunta Testbed website. (in Finnish)
 The testing of the Neppie application was carried out from August to December 2024 under the coordination of Satakunta University of Applied Sciences. The testing was carried out in the Tukena Woimaamo, where the application was used as part of the daily routines of the clients. The product under test was the Neppie application developed by FunctionApp Oy, designed to support the management of everyday routines.
The testing of the Neppie application was carried out from August to December 2024 under the coordination of Satakunta University of Applied Sciences. The testing was carried out in the Tukena Woimaamo, where the application was used as part of the daily routines of the clients. The product under test was the Neppie application developed by FunctionApp Oy, designed to support the management of everyday routines.
The aim of the testing was to assess how Neppie supports the activity management of clients and the work of professionals and to collect user experiences for the development of the application. In addition, the aim was to map out what special features are associated with application testing among Woimaamo's client group.
Test implementation
Seven clients and one supervisor from Woimaamo participated in the test. The app was mainly tested in cleaning tasks. During the test period, the app was used with two tablets twice a week, and the task sequences contained 4-8 steps. At the beginning of the test, the staff was trained to use the app. Feedback was collected through an anonymous questionnaire.
Findings and results
- Neppie supported clients in managing their activities and increased their self-direction.
- Staff suggested for smoother creation of chains.
- Scalability did not work optimally.
- The application is best suited for simple and repetitive tasks.
- Gamification was not considered necessary for adult users.
- Feedback found the app to be clear and user-friendly.
- Application testing should allow for flexibility in the testing setup and the ability to react to changing situations, as well as clear instructions for partcipants.
Suggestions for improvement
- Faster and more flexible task chain creation.
- Solving the problem of image scaling.
- Ability to hide tasks and edit chains on the fly.
- Visualisation of task chain progress and "break step" feature.
Summary
Neppie is a powerful tool for activity management, but improving its chain management would increase its usefulness and usability even further. Customers found the application easy to use and a clear tool for everyday life.
You can read more about the case on the Satakunta Testbed website. (In Finnish)
RoboAI community cases

The pilot site for the Robocoast project was Cimcorp Oy in Ulvila. In the first phase of the pilot, data related to Cimcorp's Dream Factory concept was studied.
Data from the actuators is measured throughout the operation to ensure quality and to support product development. Data analytics will be used to analyze the processes of the actuators and optimize some aspects to (further) improve performance. In analytics, data generated by the devices is retrieved from a database and analyzed to infer the performance of both individual devices and the overall system, and to make the necessary changes (iteratively) to the control system.
In addition to iteration, there are numerous opportunities to optimize production by optimizing, for example, incorrect motion paths from robots, such as too much time/current, the arc/angle of a moving actuator being too large, and the use of histograms to find fault conditions.
Data analytics can also be used to create parallel metrics by checking the reliability of the data using data from multiple data sources. This allows early detection of possible failure or malfunction of an actuator/component.
The second phase of the pilot focused on analyzing the data from the box inventory management system. The development work experimented with different data visualization tools, mainly for maintenance and development purposes. At the same time, however, it had to be kept in mind that the same data could be added in the future for customer service purposes in a clear and coherent way.
The pilot ran for a year and ended in December 2020. During the pilot, it became clear that data analysis work is a long-term and ever-changing process in an ever-evolving operator environment. As new features and new metrics are added to actuators, data analytics must keep pace and provide customers with up-to-date, clearly structured information.
Cimcorp Oy produces automated actuators for the industry for inventory management and material handling. Learn more about Cimcorp. (cimcorp.com)


The City of Pori pilot aimed to support the design and implementation of the remote work experience component of the biennial well-being at work survey by analysing and visualising the data. An expert from the DAO research group at the Tampere University developed the survey platform, which in practice consisted of two parts: semi-structured interviews and an electronic survey. The topic was very topical in view of the current situation and the aim of the survey was to get a fresh perspective from the expert of the research team.
It was important to find out how remote work is perceived in terms of well-being at work, what challenges it may have faced, and how it has affected the overall well-being of the employee. In particular, remote working remained a more permanent way of working even after the epidemic.
The semi-structured interviews involved 20 participants, of whom 6 were in a pre-personal position; 12 women and 8 men. With an average age of around 45 years; interview duration of around 25-45min; interviewees represented a wide range of industries and different types of jobs. The interview material was transcribed and analysed qualitatively using thematic data analysis.
The written report will describe in more detail the differences between sectors, but the data analysis already shows that they follow the same pattern as the results of the online survey.
A total of 922 employees of the City of Pori responded to the teleworking survey, 69% of whom had not teleworked before. Before the teleworking recommendation, the average number of days teleworking was 0.22 per week. The increase in teleworking averaged 2.27 days per week.
The Tampere University Pori unit also does a lot of business cooperation in the form of commissioned case studies. For Honkajoki Oy, a reliable automated analysis mechanism for slaughterhouse waste based on hyperspectral imaging is being developed, which could be used for further processing of slaughterhouse waste.
The unit was equipped with a hyperspectral camera from Specim Oy, which allows the detection of the level of contamination and contaminants such as metal, plastic, glass and water content in the slaughterhouse waste from the line. The hyperspectral data reference values are taken from laboratory samples of slaughterhouse waste, which have been jointly imaged by researchers from the Tampere University and Specim Oy.
The hyperspectral camera measurements are fed into the Tampere University’s neural network (artificial intelligence) computing unit, where the neural network tries to learn a cause-and-effect relationship between the hyperspectral camera measurements and the laboratory measurements of slaughterhouse waste. Several intermediate steps are needed to teach the neural network, as there is a lot of hyperspectral data and before teaching the neural network, the amount of data needs to be reduced without losing any essential data. Then, the size of the neural network needs to be determined and the optimal network learning parameters need to be found before the actual neural network teaching.
In addition, Dyme Solutions Oy has implemented a data collection solution to collect data from different processes at the Honkajoki Oy production plant in one place. The researchers at the Tampere University aim to find cause and effect relationships in the collected data, which can be used to take development measures for different processes, for example to look at energy consumption and in the future to reduce energy consumption or to predict the degradation of process-related components.


