RoboAI-akatemian opiskelijatiimi toteutti Tukimet Oy:lle selvityksen siitä, miten isokokoisten pahvilaatikoiden lavausvaihe voitaisiin automatisoida yhteistyörobotilla. Tukimetin kokoonpanotila laserkeilattiin, ja sen pohjalta rakennettiin 3D-simulaatiomalli Visual Components -ohjelmistoon. Simulaatioiden avulla tutkittiin useita yhteistyörobottipohjaisia ratkaisuja ja arvioitiin niiden sopivuutta yrityksen tuotantoon.
Mitä projektissa tehtiin?
Tukimet Oy valmistaa Raumalla monelaisia Tyke® -apuvälineitä, kuten rollaattoreita. Valmiit tuotteet ovat pakattuna pahvilaatikoihin. Niistä osa on isokokoisia, jopa 14 kiloa painavia pahvilaatikoita, jotka työntekijät laittavat käsin FIN-lavoille kahteen kerrokseen.
Opiskelijatiimin tehtävänä oli selvittää, miten yhteistyörobotti voisi keventää työvaihetta ja parantaa ergonomiaa. Tukimet Oy oli harkinnut yhdenlaista robottia, mutta valintaa ei oltu vielä lukittu – siksi projektissa tarkasteltiin myös vaihtoehtoisia malleja ja ratkaisuja.
Kokoonpanotila dokumentoitiin valokuvin ja laserkeilauksella. Laserkeilauksen avulla tuotetun pistepilven perusteella rakennettiin 3D-malli työpisteistä ja lavapaikoista (kuvat 1, 2). Simulaatioihin sijoitettiin eri yhteistyörobotteja , joiden avulla arvioitiin robotin ulottuvuutta, mahdollisuutta palvella työpisteitä yhdellä robotilla, sykliaikoja suhteessa tuotannon tahtiin sekä eri ratkaisujen vaikutuksia turvallisuuteen ja toteutettavuuteen.


Tulokset: toimiva ratkaisu simulaatioiden avulla
Projektin ensimmäisessä vaiheessa analysoitiin layoutia, jossa suunniteltu robotti sijoitettiin kahden työpisteen väliin. Työntekijä asettaisi valmiin laatikon poimintapisteelle, josta robotti lavaisi sen FIN-lavalle. Simulaatio osoitti, että perusratkaisu on toimiva, kun käytetään yleisimpiä laatikkokokoja, mutta isoimpien laatikoiden kohdalla ulottuvuus ja marginaalit jäivät paikoin epävarmoiksi.
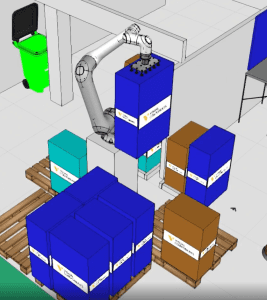
Jatkokehityksessä sama layout testattiin isommalla, kuvan 3 robottimallilla. Lisäulottuvuus ja suurempi hyötykuorma paransivat tilannetta selvästi, ja robotti ylsi kaikkiin lavauspaikkoihin myös suurimpien laatikoiden kanssa. Ratkaisu vastasi parhaiten Tukimetin nykyistä tuotantotapaa ja kevensi manuaalista nostotyötä.
Projektissa tutkittiin myös kuvassa 4 näkyvää kattokiskoon asennettua ratkaisua sekä kuvassa 5 näkyvää Doosan Robotics P3020 -cobottia, jotka mahdollistaisivat useamman työpisteen palvelemisen ja suuremman työalueen. Molemmat vaihtoehdot osoittautuivat teknisesti toimiviksi, mutta investointina ja tilamuutoksina selvästi raskaammiksi. Ne soveltuvat paremmin pitkän aikavälin kehityssuunnitelmiin kuin ensimmäiseksi käyttöönotettavaksi ratkaisuksi.


Projektin tuloksena Tukimet sai käyttöönsä simulaatiovideoita, layout-kuvia ja yhteenvedon eri yhteistyörobottiratkaisujen vahvuuksista ja rajoitteista sekä niiden vaikutuksista ergonomiaan. Samalla opiskelijatiimi sai arvokasta käytännön kokemusta laserkeilauksen, robotiikan ja simuloinnin yhdistämisestä todellisen yritysasiakkaan projektissa.
Kiitokset Tukimetille hyvästä projektiaiheesta!
![]()
Lisätietoja tästä ja muista RoboAI-akatemian projekteista:
Yliopettaja ja johtava tutkija
Mirka Leino
p. 044 710 3182
mirka.leino@samk.fi
Tutkija-opettaja
Janika Tommiska
p. 044 710 6332
janika.tommiska@samk.fi
