A student team from the RoboAI Academy carried out a project for the City of Pori’s central kitchen examining how the physically demanding and repetitive task of transferring cooked food from large kettles into transport containers could be automated. The project involved laser scanning the kitchen, rebuilding it as a 3D point cloud, and developing three simulation concepts where a robotic arm performs the portioning task. The results provide a solid basis for further development and ergonomic improvements.
The central kitchen of the City of Pori prepares approximately 1,500 kilograms of food per day. The cooked food is portioned manually into containers using large ladles (figure 1). This work phase is physically demanding, time-consuming, and repetitive. The RoboAI Academy student team was tasked with exploring how robotics could support this workflow and improve ergonomics for the kitchen staff.

What was done?
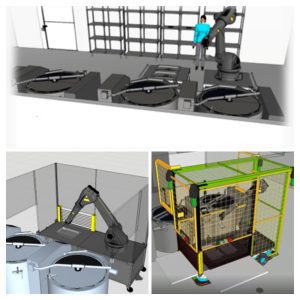
As part of the project, the kitchen was laser-scanned and reconstructed in a simulation environment. Based on this environment, the students designed three different robotic arm concept variants, which were further developed into the simulation models shown in figure 2. The simulations were used to evaluate spatial requirements, performance, safety considerations, and usability in practical operation.
Project findings and conclusions
The simulations showed that full robotic automation of the portioning phase would not be a practical solution. While technically feasible, the robotic scooping process would be significantly slower than the current manual workflow, and the system would be expensive to implement and maintain.
However, the project did highlight several realistic improvement paths, such as:
- Better utilization and refinement of the existing kettle tilting mechanisms.
- Adoption of pump-based food transfer systems where suitable.
- Wider use of assistive lifting and balancing devices to reduce physical strain.
During the final review meeting, the customer representative noted that the simulations were valuable in supporting decision-making, and providing a clear visual understanding of possible future solutions. The outcomes of this project can be used as reference material when the city continues to evaluate ergonomic and automation improvements across its kitchen facilities.
Thank you City of Pori for this great project!
![]()
More information about this and other RoboAI Academy projects:
Chief Researcher and Principal Lecturer
Mirka Leino
tel. 044 710 3182
mirka.leino@samk.fi
Researcher and Lecturer
Janika Tommiska
tel. 044 710 6332
janika.tommiska@samk.fi
